Роботы-малярных дел мастера
Совсем другого характера операции выполняют промышленные роботы, предназначенные для окраски изделий (рис. 58). Они освобождают людей от крайне неприятного труда в цехах, где с целью получения на окрашиваемых деталях равномерного и прочного слоя краски покрытие наносится с помощью краскораспылителя, действующего подобно пульверизатору. В этих цехах воздух насыщен мельчайшими частицами краски, как в парикмахерской частицами одеколона, но по сравнению с последним красители, как правило, более вредны для дыхательных путей человека, а защитить от них не может даже респиратор (устройство, сходное с противогазом). Роботы-маляры с успехом заменяют здесь людей и прекрасно справляются с окраской изделий даже сложной формы: для этого достаточно заложить в систему управления робота программу движения краскораспылителя (который укреплен на манипуляторе вместо схвата) по нужной траектории, а также время включения и выключения распылительного устройства.
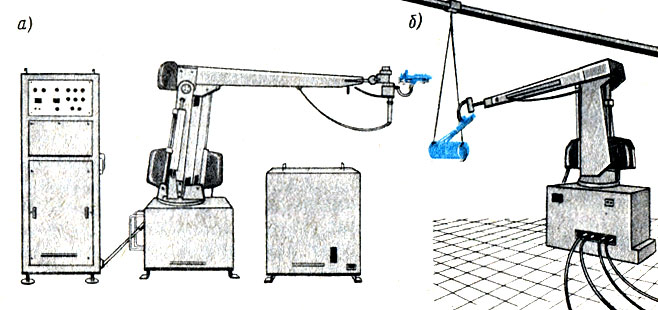
Рис. 58. Робот-маляр: а - общий вид робототехнического устройства с краскораспылителем, б - окрашивание изделия
Примером типичного робота-маляра является отечественный электрогидравлический робот "Контур-002 М" (рис. 59). Название этого робота определяется его назначением: непрерывное перемещение рабочего инструмента (краскораспылителя) по контуру - по заданной траектории. Манипулятор "Контура" имеет 6 степеней подвижности и может перемещаться по сложной кривой, благодаря чему поток частиц красителя достигает любой точки окрашиваемой поверхности. Прежде чем робот приступит к выполнению своих "профессиональных обязанностей", он проходит курс обучения малярному делу. При этом оператор, взяв его за "кисть" (конечное звено манипулятора), вручную перемещает ее по нужной траектории, а система управления робота автоматически записывает программу движения манипулятора на гибкий магнитный диск, Хотя масса манипулятора "Контура" 250 кг, его перемещение в ходе обучения не требует от оператора больших физических усилий, так как ему помогает специальная пружинная система, уравновешивающая вес "руки": сила упругости пружины, находящейся в каждом звене манипулятора, компенсирует действующую на него силу тяжести. Предусмотрены в "Контуре" и другие конструкционные особенности, облегчающие оператору процесс обучения робота. Например, чтобы жидкость в гидравлических приводах не мешала (не оказывала сопротивления) перемещению звеньев во время обучения, применены клапаны. Через эти клапаны рабочая жидкость проходит, минуя гидроприводы звеньев. Это облегчает процесс перемещения обучаемого робота.
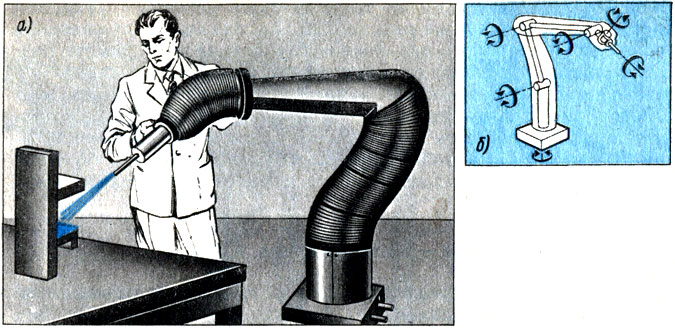
Рис. 59. Робот-маляр 'Контур-002 М': а -процесс обучения его 'профессии', б-кинематическая схема робота
В дальнейшем за выполнением записанной программы движения рабочего звена манипулятора следит система управления робота. Она получает сигналы от датчиков, которые установлены на всех звеньях его "руки", сравнивает информацию о координатах звеньев в пространстве с запрограммированными на данный момент в процессе обучения. В результате такого сравнения выдаются "команды", и в соответствующие гидроприводы поступают сигналы, управляющие движением манипулятора.
Если в манипуляторе этого робота закрепить другой рабочий инструмент, например шлифовальный круг или пескоструйный аппарат, то робот может быть не только маляром, но и механическим обработчиком поверхности, шлифуя ее или производя пескоструйную очистку. Этот тяжелый и монотонный труд вреден и опасен не только для человека, но даже и для робота. Поэтому звенья его "руки" одеты в кожухи, предохраняющие механизм манипулятора от попадания краски, металлической пыли, частиц песка.
Скорость перемещения рабочего инструмента, масса которого может быть до 10 кг, достигает у робота "Контур-002 М" 2 м/с, а погрешность воспроизведения программы не превышает 3 мм. Специальные меры защиты - кожухи и электроизоляция- позволяют применять эти роботы во взрывоопасных помещениях. Они уже трудятся на ряде предприятий страны.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'