4.1. Механизм схвата
Из-за бесконечного разнообразия форм и свойств предметов, с которыми приходится работать промышленным роиотам, выпускаются самые разнообразные механизмы схвата. Многие из них поставляются по специальным заказам.
Существуют следующие способы удержания предметов:
- односторонний зажим подобно руке человека;
- двусторонний зажим подобно клещам;
- опирание на схват за счет веса предмета;
- подвешивание на схвате (по типу крюка);
- присасывание с помощью вакуума;
- притягивание с использованием электромагнитных сил.
В большинстве промышленных роботов механизм схвата выполнен в виде набора деталей (2-4 штуки), напоминающих пальцы, но без суставов.
Для удержания плоских предметов (полос, листов и т. д.) используют механизмы схвата, осуществляющие притягивание. Вакуумные схваты особенно широко используются для удержания стеклянных предметов.
Схваты, как правило, легко менять в зависимости от вида предметов, с которыми оперирует робот. Имеются и механизмы схвата, сами обладающие достаточной универсальностью, как, например, схват, показанный на фиг. 4.1. Пружина, смонтированная на этом схвате, позволяет ему захватывать прутки, произвольно ориентированные в пространстве.
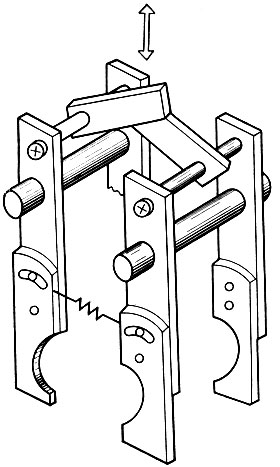
Фиг. 4.1. Механизм схвата для произвольно ориентированных прутков
Недавно появились сообщения о разработке механизма схвата, состоящего из пяти имеющих сочленения пальцев, сходного с рукой человека ("универсальные пальцы", IHI).
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'