4.3. Технические характеристики
В настоящее время несколько десятков фирм занимается изготовлением промышленных роботов, технические данные которых существенно различаются1. В качестве примера в табл. 4.1 приведены технические характеристики роботов "Юнимейт" и "Версатран".
1 (Подробнее об этом см. гл. 8, табл. 8.2.)
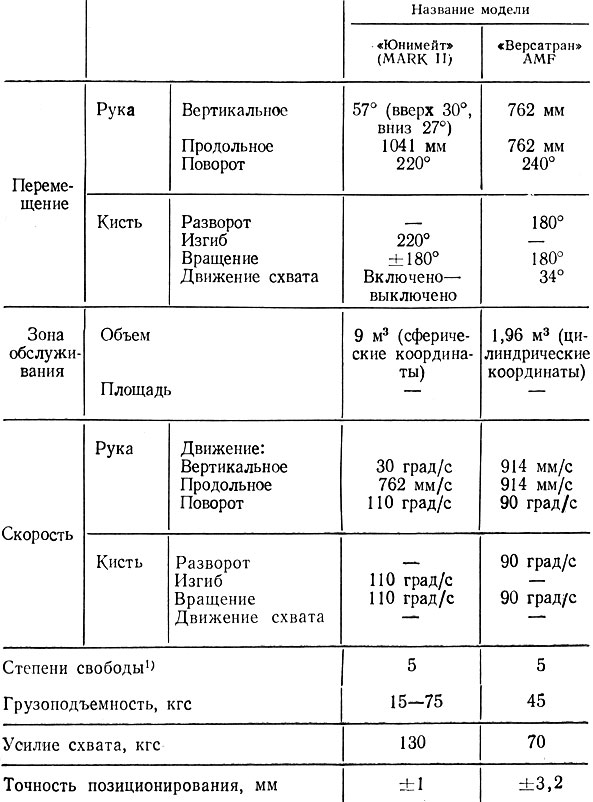
Таблица 4.1. Примеры технических характеристик роботов (Данные по всем фирмам-изготовителям см. табл. 8.2.)
1 (В число степеней свободы не включено движение схвата.)
Большинство роботов (89%) обладает возможностью перемещения по оси 1 в пределах от 1 до 0,1 м. У 98 % моделей максимальная скорость перемещения руки составляет от 1 до 0,1 м/с. С учетом параметров рабочей зоны приведенные характеристики соответствуют возможностям руки человека.
В большинстве случаев роботы имеют от 3 до 6 степеней свободы (подробнее см. фиг. 8.1).
Что касается распределения степеней свободы, то на первом месте стоит вертикальное перемещение, затем идут продольное перемещение и поворот руки. Среди моделей с количеством степеней свободы более трех чаще всего встречаются модели, у которых к указанным степеням свободы добавляются разворот и наклон кисти.
Модели грузоподъемностью от 50 до 10 кгс составляют 54%, а от 10 до 1 кгс - 42%. Можно сказать, что они располагают такими же возможностями транспортировки, как один или несколько человек.
Точность позиционирования у большинства моделей составляет от ±5 до ±1 мм: чаще всего это консольные конструкции, предназначенные для транспортировки предметов. Но в последнее время точность повышается и появляется много роботов с точностью позиционирования от ±1 до ±0,1 мм (подробнее об этом см. фиг. 8.4).
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'