6.2. Сборочные операции (автомобильная промышленность)
1) Примеры применения. В общем случае сборку можно подразделить на а) ручную, б) выполняемую специализированными автоматическими устройствами и в) осуществляемую с помощью роботов. Если сравнивать эти три способа, например по скорости, то как человек, так и робот уступают сборочным автоматам. Но в тех случаях, когда характер операций меняется в течение короткого промежутка времени, экономичнее вкладывать капитал в роботы, чем в специализированные сборочные автоматы, так как роботы обладают большей универсальностью. В случае крупносерийного производства мелких изделий, операции по сборке которых непродолжительны, выгоднее применять специализированные сборочные автоматы. В мелкосерийном же производстве крупногабаритных изделий большого веса с продолжительными операциями сборки целесообразнее использовать роботы.
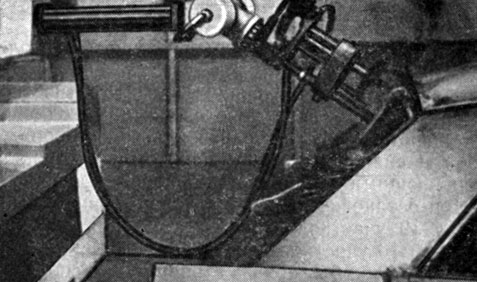
На фиг. 6.5 показан пример применения робота, когда на руке робота укреплены пистолет для точечной сварки и механизм подачи. Достаточным основанием для применения робота в этом случае является уже то обстоятельство, что человеку очень трудно долго держать в правильном положении сварочный пистолет весом 20-30 кг.
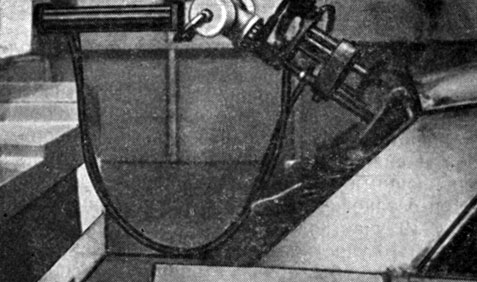
Фиг. 6.5. Сварка кузова автомобиля (фирма 'Кавасаки Дзюкогё')
На фиг. 6.6 показана сварка на автоматической линии с применением двух роботов, которые одновременно выполняют сварку на правой и левой сторонах кузова. Роботы снабжены запоминающими устройствами, обеспечивающими возможность выбора программы работы. При остановке конвейера каждый робот выполняет сварку 19 участков кузова автомобиля с жесткой крышей или 16 участков кузова автомобиля с откидным верхом. На фиг. 6.7 показан пример использования группы роботов, установленных по обе стороны автоматической линии сборки на автомобильном заводе в Детройте (США). Роботы выполняют операции в своей рабочей зоне на каждом из технологических участков конвейера. Этот пример свидетельствует о наступлении эры подлинной автоматизации сборочных линий.
Фиг. 6.6. Схема расположения роботов при точечной сварке правой и левой сторон кузова автомобиля (фирма 'Кавасаки Дзюкогё')
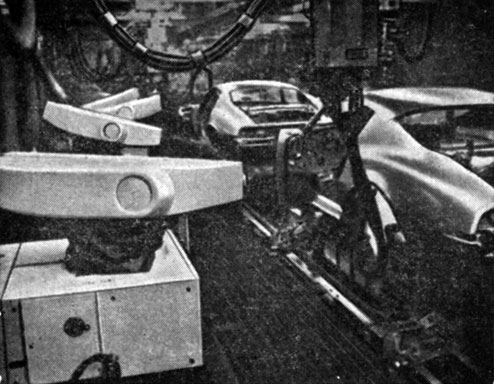
Фиг. 6.7. Группа роботов, ведущих точечную сварку на линии сборки кузовов (автомобильный завод в Детройте, США; данные фирмы 'Кавасаки Дзюкогё')
2) Факторы, требующие особого внимания.а) Специальный магазин. Робот способен выполнять множество различных операций, в том числе точечную сварку, несложную сборку и т. д. Но одним из существенных отличий робота от человека является отсутствие у него органов зрения. Поэтому для подачи деталей роботу используются специальные магазины. Один из них показан на фиг. 6.8. Обычно он выполнен в форме вертикального вращающегося барабана с гнездами. Барабан состоит из плоских поддонов, установленных один над другим, причем детали на поддонах размещаются в один ряд. В процессе работы детали снимаются с нижних и помещаются на верхние поддоны.
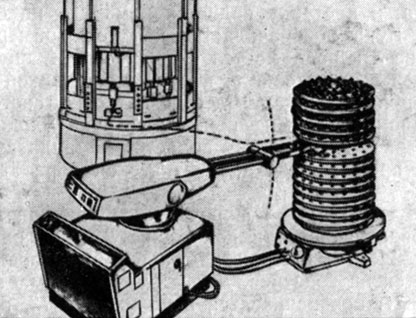
Фиг. 6.8. Специальное загрузочное устройство (фирма 'Кавасаки Дзюкогё')
б) Устройство распределения деталей. Рука робота не обладает такой же гибкостью и ловкостью, как рука человека, поэтому руки робота должны быть снабжены механизмами схвата, способными удерживать детали различной формы и веса. Однако предусматривать слишком большое количество схватов не рационально. Обычно применяют метод сборки, при котором робот действует подобно поворотному столу с периодической остановкой. Вначале захватывается и устанавливается самая важная - несущая деталь, а затем из распределительного устройства с деталями достается одна деталь и соединяется с несущей при помощи винтового зажима или каким-то другим путем. После этого из распределительного устройства достается следующая деталь, и, повторяя эти операции, выполняется сборка. В отличие от поворотного стола робот не требует очень точной установки обслуживаемого оборудования. Преимуществом робота является и то, что в одном месте можно выполнять несколько операций сборки.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'