6.3. Механическая обработка
На фиг. 6.9 показан пример использования робота для подачи и съема деталей на токарном автомате. Детали типа валика, расположенные на лотке в ряд, снимаются и ставятся при помощи руки робота, на которой укреплен специальный зажимной патрон для подачи и съема деталей и которая поворачивается вокруг горизонтальной оси.
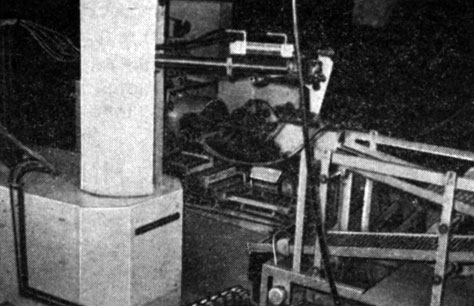
Фиг. 6.9. Подача и съем деталей на токарном автомате (фирма 'Тосиба Сэйки')
Движения руки робота поясняются схемой, приведенной на фиг. 6.10. В положении начала цикла 1, если выполнены условия возвращения в исходное положение, патрон станка с гидравлическим приводом зажимов закрыт и патрон остановлен. Рука робота опускается, в положении 2 захватывается деталь, обработка которой закончена, и к станку подается команда на открытие патрона. Рука поворачивается на угол примерно 5° в положение 3 и поднимается в положение 4, кисть поворачивается в положение 5, и рука с заготовкой движется вниз в положение 6. Здесь схват открывается и заготовка помещается на подставку; рука уходит вверх в положение 7, и к станку подается команда пуска, после чего производится автоматическая обработка заготовки.
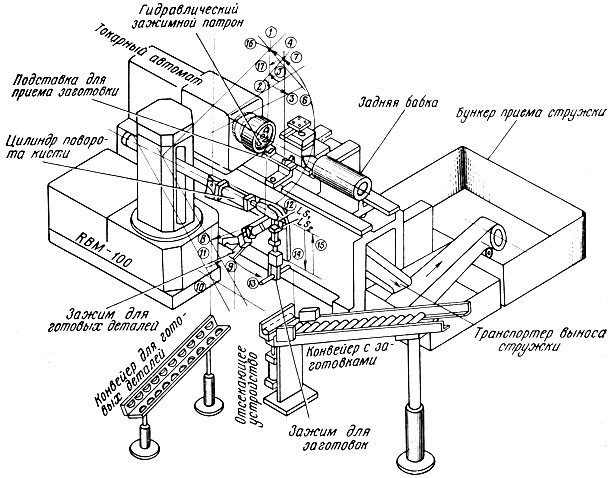
Фиг. 6.10. Схема участка с использованием робота (фирма 'Тосиба Сэйки')
После этого рука поворачивается в положение 8, кисть поворачивается в положение 9, рука опускается в положение 10, схват открывается, и готовая деталь помещается на конвейер. Далее рука поднимается в положение 11, поворачивается в положение 12, где кисть поворачивается в положение 13 и схват для заготовки направляется вниз. В положении 12 подается команда на подъем отсекающего устройства, которое несет заготовку. Рука опускается в положение 14, схват берет заготовку, рука поднимается в положение 15, поворачивается в положение 16, кисть поворачивается в положение 17, где робот ожидает сигнала начала следующего цикла.
На фиг. 6.11 показан пример использования робота совместно с двумя токарными станками. Подача и съем заготовок производятся синхронно с циклом работы станка. Рядом с роботом установлены два стандартных токарных станка слегка видоизмененной конструкции. Предусмотренная в системе блокировка обеспечивает начало операции точения одновременно с возвратным движением руки. Из исходного положения, при котором рука опущена, робот прежде всего разворачивается к станку № 2, снимает деталь, обработка которой в этот момент закончена, и кладет ее на транспортировочный конвейер. Затем робот снимает деталь, обработка которой закончена на станке № 1, и кисть подводится к станку № 2. Робот берет заготовку с подающего конвейера и несет ее на станок № 1. После этого он возвращается в исходное положение, и на этом 1-й цикл операций заканчивается.
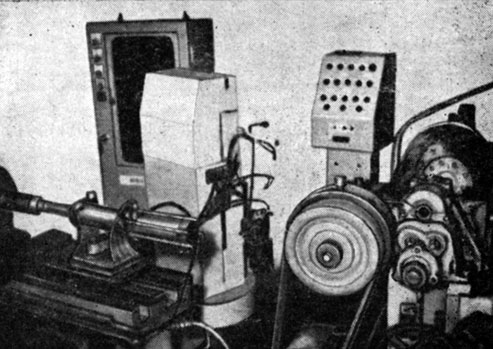
Фиг. 6.11. Обслуживание роботом двух токарных станков (фирма 'Ясуи Сангё')
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'