6.8. Прочие примеры применения
1) Операции штабелирования. На фиг. 6.41 показана перегрузка заготовок для листовых рессор с конвейера на поддон. Погрузка и разгрузка заготовок в процессе производства изделий - настолько часто повторяющиеся операции, что возможна автоматизация всей линии с помощью специального автоматического оборудования. Но существует много заводов, где для подачи заготовок к станкам и для транспортировки их от станков используют разнообразные поддоны, порядок операций с которыми меняется. Для укладки материалов штабелями на поддоны и для их разгрузки здесь используют рабочую силу. Когда детали легкие, никаких проблем не возникает, но если они весят более 15 кг, как заготовки, показанные на фиг. 6.41, рационально заменить человека роботом.
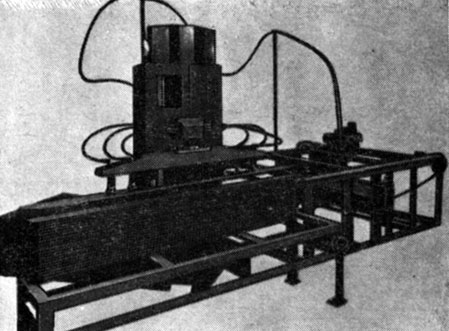
Фиг. 6.41. Операция переноски поддонов с заготовками для пружинных рессор (фирма 'Ясуда Тэккосё')
2) Пищевая промышленность. На фиг. 6.42 показано, как в процессе производства пищевых продуктов робот поднимает емкость с приготовленной нагретой жидкой смесью, переносит ее и помещает над соседней установкой. Здесь робот опрокидывает емкость, выливает содержимое и с пустой емкостью возвращается в исходное положение. Этим заканчивается один цикл операций.
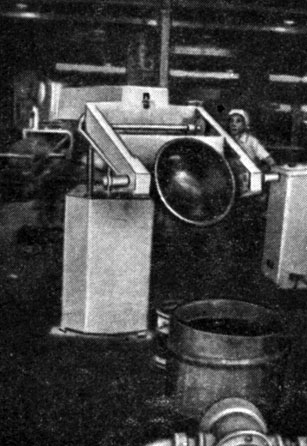
Фиг. 6.42. Пример использования робота в пищевой промышленности (фирма 'Ясуи Сангё')
3) Производство кирпича. На фиг. 6.43 показан пример выполнения операции автоматической укладки кирпича на транспортер с помощью руки, обладающей подвижностью вдоль осей х, yf z прямоугольной системы координат. Специальный схват для переноса кирпича показан на фиг. 6.44. Схват может поворачивать кирпич, благодаря чему обеспечивается большая точность и равномерность укладки, чем при совершении этих операций вручную.
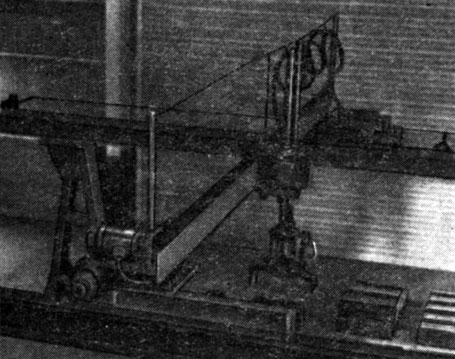
Фиг. 6.43. Применение робота на загрузке кирпича (фирма 'Ясукава Дэнки')
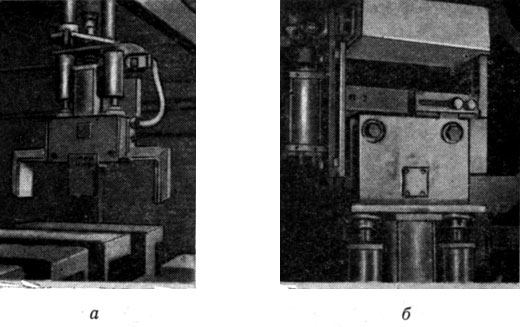
Фиг. 6.44. Специальный схват для переноса кирпича (фирма 'Ясуи Сангё'). а - специальный схват для переноса кирпича; б - специальный схват для переноса кирпича с устройством разворота.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'