Мобильные роботы специального назначения
К таким роботам обычно относят роботы, способные автоматически перемещаться по неровному полу, на открытой местности или по каким-либо другим специфическим поверхностям. Типовые специфические поверхности включают произвольную неровность (открытый участок), уступ, лестницу, стену. Для перемещения по перечисленным специфическим поверхностям помимо колесных тележек применяются гусеничные механизмы, шагающие аппараты-педипуляторы, тележки с адсорбционными присосками, а также механизмы, способные при движении помогать себе руками.
Мобильный робот, способный преодолевать препятствия типа "уступ"
Этот робот разработан фирмой Tracer (США) и получил название "Centipede" ("Сколопендра"). Он состоит из трех одинаковых секций (рис. 4.11). Каждая секция представляет собой короткую тележку с парой колес относительно большого диаметра. Тележки попарно соединены между собой гибкой сцепкой пружинного типа. При встрече с препятствием, высота которого может превосходить диаметр колес, тележки трехзвенного механизма последовательно, одна за другой вскарабкиваются на уступ (рис. 4.11, а-г).
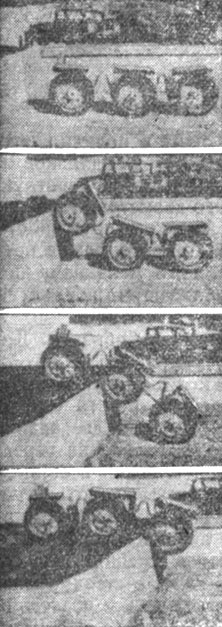
Рис. 4.11. Специализированный мобильный робот 'Centipede' преодолевает препятствие типа 'уступ' (фирма Tracor)
Преодоление уступа осуществляется следующим образом. Колеса передней тележки, достигнув уступа, упираются в него и продолжают вращаться. За счет силы трения колес о вертикальную стенку уступа, а также под напором второй и третьей секций первая тележка начинает приподниматься. Так как две задние тележки могут оказывать достаточно большое давление на переднюю, то сила трения между колесами первой тележки и стенкой весьма велика и проскальзывание практически исключается. В результате первая тележка, поднимаясь все выше, достигает вершины уступа. Взобравшись на уступ, она начинает увлекать за собой вторую, среднюю тележку. Таким образом, средняя тележка поднимается не только за счет силы трения колес о стенку, зависящей от величины давления, которое оказывает на нее последняя тележка (оно по-прежнему достаточно велико), но и за счет натяжения сцепки от первой тележки. Как только две тележки оказались наверху, они втягивают за собой последнюю, третью тележку, и уступ преодолен.
В рассматриваемом методе преодоления высоких уступов нашли применение два основных принципа, широко используемых при построении других транспортных механизмов аналогичного назначения. Один из них - это увеличение трения колес передней тележки о стенку за счет давления, прикладываемого со стороны задних тележек, расположенных на ровном участке. Собственно благодаря именно этому тележке удается вскарабкаться на уступ. Другой - применение составных тележек, при этом каждая из тележек должна иметь определенную свободу относительных перемещений.
Оба эти принципа, объединенные в одном устройстве, позволяют механической "Centipede" не только взбираться на уступ, но и легко справляться с другими, не менее сложными препятствиями. Например, "Centipede" без особых затруднений перебирается через поваленные рядом друг с другом стволы гигантских деревьев (рис. 4.12). Проходимость такого робота в конкретных условиях может быть повышена путем соответствующего подбора параметров отдельных тележек, объединения в одном устройстве тележек различных типов, а также путем применения более эластичных сцепок.
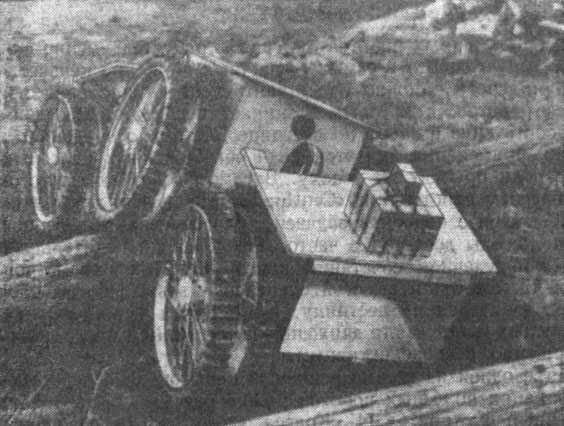
Рис. 4.12. 'Centipede' перебирается через стволы поваленных деревьев (препятствие типа 'неровность')
"Centipede" является дистанционно управляемым роботом. На передней тележке установлена телевизионная камера, которая передает человеку-оператору изображение поверхности почти перед роботом. Таким образом, в каждый момент времени оператор располагает информацией о том, в каких условиях работает мобильный робот, и может подсказать роботу оптимальный способ преодоления препятствий в зависимости от их формы и размера.
На рис. 4.13 показано автоматическое кресло на колесах, которое также обладает способностью преодолевать препятствие типа "уступ". Конструкция этого кресла предложена д-ром Сэкитани. Для преодоления высоких препятствий используются те же принципы, что и в трехсекционном мобильном роботе "Centipede", но в данном случае роль передней тележки выполняет пара подвесных колес, расположенных в передней части. Таким образом, подобно роботу "Centipede", кресло перемещается на шести колесах. При столкновении с уступом подвесные колеса упираются в уступ и, вращаясь, поднимают переднюю часть кресла на высоту уступа. Как и прежде, необходимая величина сцепления с поверхностью стенки достигается за счет работы четырех оставшихся колес. Преодолев уступ, подвесные колеса начинают двигаться по горизонтальной плоскости. В результате облегчается подъем средней и задней осей кресла.
Рис. 4.13. Автоматическое кресло-качалка, способное преодолевать препятствия типа 'уступ'. 1 - спинка кресла; 2 - сиденье; 3 - поворотный кулачок; 4 - задние ведомые колеса; 5 - передние ведомые колеса; 6 - ведущее колесо; 7 - поворотный кулачок позволяет легко приподнимать передние колеса на высоту уступа
Мобильный робот, способный подниматься по лестнице
От интеллектуальных роботов будущего требуется умение выполнять заданную работу в самых различных априорно неизвестных условиях среды. Можно представить себе немало областей применения роботов, в которых возникает необходимость перемещения робота вниз и вверх по лестнице. Нетрудно предвидеть, что попытки применения для этой цели обыкновенных колесных роботов едва ли приведут к успеху. В самом деле, даже многозвенные колесные роботы типа "Centipede" или кресло д-ра Сэкитани не справятся с подобной задачей, если ступеньки лестницы будут расположены достаточно часто. Только в исключительных случаях - при удачном сочетании конструктивных параметров механизмов с частотой и высотой ступенек - этим роботам посчастливится забраться на лестницу. Но в целом использование любых колесных роботов для движения по лестницам представляется совершенно бесперспективным.
В качестве одной из весьма реальных попыток непосредственной модификации колесных роботов можно рассматривать робот, представленный на рис. 4.14. Колеса этого робота оснащены лопастями, с помощью которых он может цепляться за ступеньки лестницы.
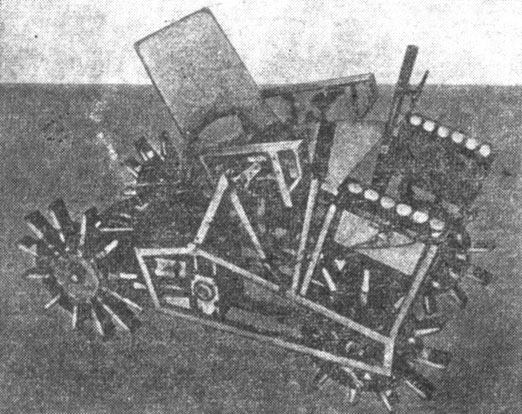
Рис. 4.14. Мобильный аппарат с колесами-лопастями, способный перемещаться по лестницам
Устройство еще одного робота, специально ориентированного на движение по ступенькам, иллюстрируется на рис. 4.15. Этот робот разработан под руководством профессора Токийского университета д-ра Накано. Главной отличительной особенностью его является конструкция механизма перемещения, состоящего из четырех вращающихся блоков, каждый из которых образован тремя маленькими колесиками (расположенными симметрично относительно центра блока (рис. 4.15)). С помощью такого механизма передвижения робот может достаточно уверенно спускаться и подниматься по лестницам с различными параметрами ступенек. Тем не менее границы применимости какого-либо одного конкретного конструктивного исполнения робота Накано определяются предельно допустимыми соотношениями между размерами ступенек и диаметром колес и блоков. Интересно отметить, что в отличие от предыдущего робота с колесами-лопастями робот с трехколесными вращающимися блоками при движении по ровному полу перемещается плавно, подобно обычным колесным транспортным средствам. При этом по поверхности (полу) движутся два маленьких колеса каждого блока, а третье колесо находится в вертикальном положении над осью блока.
Рис. 4.15. Специализированный колесный аппарат, способный перемещаться по лестницам. 1-4 - вращение малых колеcиков (поступательное движение); 5, 6 - вращение блоков; 7 - изгиб рычага крепления блоков
На рис. 4.16 показан общий вид мобильного робота "Scorpion" на гусеничном ходу. Робот разработан сотрудниками Научно-исследовательского центра по атомной энергетике в г. Карлсруэ (ФРГ). Гусеничная конструкция механизма передвижения обусловила основной способ перемещения робота в пространстве - переползание. Гусеничный механизм состоит из четырех гусеничных опор с независимым управлением (по две опоры у передней и задней тележек). "Scorpion" преодолевает ступеньки за счет сцепления гусениц с полом. Для передней тележки величина сцепления усиливается под напором задней тележки точно так же, как это имело место в случае с роботом "Centipede". Для большинства мобильных роботов специального назначения, включая все рассмотренные в данной главе, изменение направления движения в процессе преодоления препятствия становится настоящей проблемой. Эта проблема оказывается неразрешимой, если разворот должен быть осуществлен в пределах очень ограниченного пространства. "Scorpion" справляется с подобной задачей следующим образом. Если площадь для разворота (например, лестничная клетка) слишком мала, чтобы выполнить обыкновенный поворот по дуге, то пары гусениц передней и задней тележек начинают вращаться навстречу друг другу и продолжают вращаться до тех пор, пока тележки не займут вертикальное положение (рис. 4.16). После этого за счет вращения гусениц с одной из сторон робот, подобно балерине на пуантах, поворачивается в заданном направлении, практически не двигаясь с места. Таким образом, робот может преодолевать и отдельные ступеньки, и лестницы произвольной конфигурации, а также любые другие препятствия аналогичного профиля.

Рис. 4.16. Мобильный гусеничный робот 'Scorpion'. (Научно-исследовательский центр по атомной энергетике, г. Карлсруэ, ФРГ)
"Scorpion" разработан и выпускается в качестве мобильного робота для автоматизации операций обслуживания в активной зоне атомных реакторов. Конструктивные принципы, благодаря которым "Scorpion" получил исключительно широкие возможности перемещения в среде с произвольными препятствиями, имели огромное значение для исследователей, занятых разрешением такой чрезвычайно актуальной проблемы, как создание автоматических мобильных аппаратов для обслуживания ядерных установок.
Мобильные роботы, способные перемещаться по стене
Для перемещения по вертикальной стене, очевидно, необходимо каким-то образом зацепляться за поверхность стены. Наиболее распространенные методы зацепления основаны на использовании различных адсорбционных механизмов. В качестве таких механизмов могут использоваться, например, вакуумные присоски, сходные по принципу действия со щупальцами осьминога. Присоски выполняются в виде опрокинутых чашечек, плотно прилегающих к поверхности стены; эффект зацепления достигается за счет создания отрицательного давления в полости чашечки в результате удаления (откачки) оттуда воздуха. Если стена и конечности выполнены из соответствующих металлов, зацепления можно добиться, используя магнитные свойства этих материалов.
Пользуясь первым из двух перечисленных способов, следует учитывать, что, какой бы высокий вакуум ни удалось создать в полости чашечки-присоски, величина отрицательного давления никогда не превысит значения 1 атм. Поэтому для надежного удержания достаточно тяжелых аппаратов диаметр чашечек (площадь присасывания) должен быть достаточно большим. Кроме того, если между краем чашечки и плоскостью стены будет существовать хотя бы малейший зазор, то получить высокий вакуум не удастся, и величина отрицательного давления будет значительно меньше 1 атм. Таким образом, степень шершавости поверхности является решающим фактором при определении целесообразности использования роботов с вакуумными присосками. Очевидно, что в тех случаях, когда на стене имеются царапины, желобки, буртики или уступы, о применении вакуумных механизмов не может быть и речи. Следовательно, обычные вакуумные присоски нельзя считать универсальным средством для решения задачи о перемещении роботов по стенам. Однако нужно иметь в виду, что возможны ситуации, в которых сочетание вакуумных присосок с шагающими механизмами в конструкциях мобильных роботов оказывается весьма эффективным. В качестве одной из таких ситуаций можно рассматривать перемещение роботов по бортовым стенкам крупных судов при выполнении каких-либо строительных или ремонтных работ. Шероховатость наружной бортовой поверхности незначительна, и вакуумные присоски могут надежно удерживать шагающий аппарат. Роботы, способные перемещаться по гладким стенам, необходимы также для контроля, обслуживания и ремонта крупных емкостей, таких, как котлы атомных электростанций и нефтеналивные цистерны-танки.
Практическое применение магнитного способа зацепления за поверхность стены сопряжено с двумя проблемами. Во-первых, его использование ограничено небольшим набором соответствующих материалов, из которых могут быть изготовлены стена и конечности мобильного робота. Во-вторых, и в процессе перемещения робота по стенке придется затрачивать большое количество энергии для отрыва каждой из притянутых магнитом конечностей робота*.
* (Как сообщалось, д-р Хиросэ из Токийского технологического института разработал шагающий по стенам аппарат с магнитным способом прикрепления, но без размагничивания для отрыва конечностей от поверхности стены.)
Несмотря на отдельные успехи, работы по созданию практичных мобильных роботов, способных уверенно перемещаться по вертикальной поверхности, пока еще далеки от завершения. Одной из центральных проблем в этом направлении остается разработка способов, обеспечивающих надежное удержание на гладкой стене мобильного аппарата с установленным на нем манипулятором, предназначенным для выполнения каких-либо технологических операций на стене. Кроме того, потребуются технические и алгоритмические средства, позволяющие "настенному" роботу распознавать препятствия при перемещении по стене (например, окно или эркер при перемещении по стене многоэтажного дома) и обходить их, меняя произвольным образом направление движения. Очевидно, что для современного уровня развития техники и та и другая задачи оказываются чрезвычайно трудными.
Заслуживающий внимания "настенный" мобильный робот был разработан Научно-исследовательским центром проблем пожарной безопасности при пожарном управлении Токийского муниципалитета. Этот робот "Rescue climber" ("Спасатель-восходитель") в отличие от большинства настенных роботов с вакуумными присосками имеет несколько иной принцип зацепления. С помощью мощного насоса вакуум создается не в чашечках присосок, а во всем объеме между дном корпуса робота и стеной. Удерживаясь в результате разрежения в вертикальном положении, робот перемещается по стене с помощью обычных колес, расположенных в нижней части корпуса. Еще один настенный робот был разработан сотрудниками Научно-исследовательского центра проблем механики д-ром Носаки и д-ром Икэда (рис. 4.17). Этот экспериментальный настенный робот удерживается на вертикальной поверхности за счет отрицательного давления под присосками, которое создается специальным вакуумным насосом.
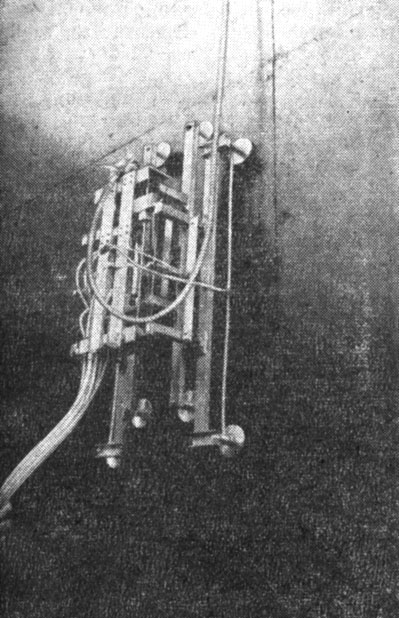
Рис. 4.17. Адсорбционный мобильный робот. Робот удерживается на вертикальной стене с помощью вакуумных присосок
Помимо подлинно мобильных настенных роботов, способных автономно перемещаться по вертикальной поверхности в произвольном направлении, разрабатываются и активно применяются так называемые полуавтономные роботы, которые могут двигаться вверх-вниз по стенам при помощи тросов и лебедки, установленной где-либо под потолком или на крыше здания. В частности, такие роботы используются для мойки окон в высотных зданиях. К подвижной части робота-мойщика крепится гондола, в которой размещается устройство для автоматической мойки окон. Пока что полуавтономные настенные роботы более просты по конструкции и значительно надежнее в эксплуатации. Все, что требуется для их использования, - это установить на крыше здания или под потолком помещения блок с тросами и подъемным механизмом.
Другие типы мобильных роботов специального назначения
Мобильные роботы для перемещения по трубопровода. Одна из основных проблем обеспечения безопасности эксплуатации атомных электростанций заключается в своевременном обнаружении и устранении утечки радиоактивного пара из трубопроводов системы охлаждения ядерного реактора. Недавно во Франции в целях автоматизации контроля за состоянием трубопроводов на атомных электростанциях был разработан специализированный мобильный аппарат IPRIV, способный перемещаться внутри труб*. Этот уникальный по своему назначению дистанционно управляемый мобильный аппарат состоит из корпуса на двух колесах и двух рук, расположенных по обеим сторонам корпуса и используемых в качестве дополнительной опоры. При движении робота внутри трубы руки раздвигаются в противоположную от колес сторону (рис. 4.18), в результате чего увеличивается сила сцепления колес со стенкой трубы и полностью исключается их проскальзывание. Робот такой конструкции может использоваться не только для выполнения транспортных операций внутри трубы, но и для движения по любым достаточно узким коридорам. В частности, он может подниматься и опускаться в пространстве между тремя стенами, если расстояние между вертикальными поверхностями окажется не слишком большим.
* (IPRIV - in pipe remote inspection vehicle.)
Рис. 4.18. Общий вид специализированного робота IPRIV
В 1982 г. робот для перемещения внутри трубопровода был разработан японской компанией Tochiba. Конструкция этого робота практически полностью совпадает с конструкцией рассмотренного французского робота. Единственное отличие заключается в том, что в данном случае тележка перемещается на трех колесах, а не на двух и при движении в стенки трубы упираются три, а не два стержня. Различие в системах управления оказывается более существенным: в японском роботе силы и моменты сил, создаваемые опорными стержнями, управляются с помощью компьютера.
На рис. 4.19 изображен специализированный мобильный робот, по принципу действия напоминающий модель IPRIV, но предназначенный для перемещения по наружной поверхности трубы. В процессе движения он обхватывает трубу двумя парами механических рук и "прижимается" корпусом к поверхности трубы с достаточной силой, что позволяет предотвратить проскальзывание колес тележки.
Рис. 4.19. Общий вид специализированного робота OPRIV
На рис. 4.20 и 4.21 показано устройство робота, предназначенного для контроля за состоянием пропускных каналов гидротурбин. Робот разработан компанией Tochiba под руководством д-ра Мидзокути. При перемещении по сложной криволинейной поверхности канала робот удерживается на крутых участках при помощи магнитов, встроенных в колеса тележки. Таким образом, тележка может автоматически перемещаться в любом направлении по поверхности канала. На тележке установлены телевизионная камера и механическая рука-манипулятор. Захват манипулятора оснащен устройством обнаружения дефектов поверхности и датчиками, измеряющими расстояние.
Рис. 4.20. Общий вид робота для контроля турбин гидроэлектростанций. 1 - рабочий диапазон дефектоскопа' 150°; 2 - зона обслуживания манипулятора 120°; 3 - ширина мобильной платформы, 200 мм; 4 - длина мобильной платформы, 400 мм; 5 - габаритная длина - расстояние от заднего буфера до объектива телекамеры, 660 мм; 6 - дефектоскоп; 7 - устройство перемещения дефектоскопа; 8 - сенсоры системы обучения; 9 - телекамера; 10 - манипулятор; 11 - мобильная платформа; 12 - система приводов манипулятора, генератор задающих импульсов; 13 - высота мобильного аппарата, 155 мм; 14 - общая масса мобильного аппарата 13 кг
Рис. 4.21. Устройство мобильной платформы робота для контроля турбин гидроэлектростанций. 1 - устройство демпфирования колебаний манипулятора; 2 - ходовая часть мобильной платформы
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'