2.3. Алгоритмы определения положения исполнительных механизмов и рабочих органов
Конфигурация исполнительного механизма робота определяется m-мерным вектором обобщенных координат q. Зная q, можно определить положение и ориентацию отдельных звеньев механизма и рабочих органов. Задачи такого рода называются прямыми задачами о положении механизмов РТК.
Необходимость в решении прямой задачи в робототехнике возникает в связи с тем, что текущие положение и ориентация некоторых звеньев исполнительного механизма (например, захвата манипулятора) зачастую не могут быть определены путем прямых измерений. Вместо этого имеется возможность точно измерить относительные положения звеньев, например, с помощью позиционных датчиков обобщенных координат. По этим данным можно вычислить положение и ориентацию всех звеньев, в том числе и рабочих органов.
Рассмотрим особенности решения прямой задачи для манипуляционных роботов. В роли обобщенных координат qj, j= 1,…, m манипулятора обычно выступают углы между звеньями или длина звеньев с. Поэтому вектор обобщенных координат у манипулятора с вращательными и поступательными кинематическими парами имеет компоненты
 (2.12)
(2.12)
Тип кинематической схемы манипулятора задается m-мерным вектором σ с компонентами
 (2.13)
(2.13)По вектору обобщенных координат q однозначно определяется положение и ориентация всех звеньев манипулятора. Свяжем с j-м звеном правую ортогональную локальную систему координат с началом в точке rj и ортами еj1, ej2, еj3, причем rj расположим на кинематической оси (j-1)-го и j-го звеньев, а орт е13 направим по этой оси. Будем считать, что система координат стойки манипулятора совпадает с абсолютной неподвижной системой координат, т. е. формула 3
Каждому звену манипулятора поставим в соответствие матрицу размерности 3*4 следующего вида:
 (2.14)
(2.14)
Геометрический смысл матрицы Kj ясен из ее структуры: первый столбец характеризует положение j-го звена в абсолютной системе координат 0d1d2d3 (точнее, положение начала j-й локальной системы координат, связанной с j-м звеном), а три остальных ориентацию j-го звена. Очевидно, что матрица Kj однозначно определяет положение j-го звена манипулятора в рабочем пространстве, поэтому матрица (2.14) называется матрицей кинематических характеристик манипулятора [66].
Выразим элементы матрицы кинематических характеристик через обобщенные координаты механизма. Это позволит по единой формуле экономно вычислять положение и ориентацию всех звеньев манипулятора непосредственно по его обобщенным координатам.
Введем для краткости записи следующую операцию произведения 3*4-матриц Ki = (ri, Ei), Kj=(rj, Ej):
 (2.15)
(2.15)а также 3*4-матрицы преобразований [66]
 (2.16)
(2.16) Здесь Aj - 3*4 - матрицы вида
 (2.17)
(2.17)Т - символ транспонирования. Матрицы (2.17) формируются заранее в исходном положении манипулятора, т. е. при q=0.
При этих обозначениях матрицы кинематических характеристик определяются рекуррентными формулами
 (2.18)
(2.18)Выберем на j-м звене некоторую точку rj*. Обозначим через dj* вектор координат этой точки в локальной системе координат rjej1ej2ej3. Тогда положение точки rj* определяется формулой
 (2.19)
(2.19)На практике часто требуется знать положение некоторой характеристической точки r* на захвате манипулятора. Оно однозначно определяется уравнением кинематики (2.1), где
 (2.20)
(2.20)Значительный интерес для программирования движений роботов представляет и обратная задача о положении механизма. Эта задача заключается в определении обобщенных координат q, определяющих возможные конфигурации исполнительного механизма по заданным положению и ориентации некоторых его звеньев. Например, для манипуляционного робота часто требуется по заданному положению схвата r* найти отвечающие ему векторы обобщенных координат q, т. е. нужно решить уравнение кинематики (2.1).
Различные алгоритмы решения обратной задачи о положении манипулятора при m≤ 6 описаны в работах [32, 42, 88]. Они решают уравнения (2.1) "в лоб". Это позволяет выделить в явном виде конечное число ветвей решения уравнения (2.1). В ряде случаев (например, при наличии препятствий в рабочей зоне) для увеличения маневренности манипулятора нужна определенная кинематическая избыточность. Это достигается увеличением степеней свободы манипулятора так, чтобы было т>6. Появились даже гибкие манипуляторы типа "хобот", у которых т>10. Для таких манипуляторов с большой кинематической избыточностью нужны методы решения уравнений (2.1), ориентированные на использование ЭВМ.
Ряд методов решения обратной задачи о положении основывается на сведении решения уравнения (2.1) и минимизации функционала вида [42, 50, 67, 88 ]
 (2.21)
(2.21)Этот функционал обладает следующими свойствами:
- Ψ (q) -непрерывно дифференцируемая функция, причем Ψ (q)≥ 0;
- если градиент Δ Ψ (q) = 0, то Ψ (q) = 0 (здесь Δ Ψ= ∂Ψ/ ∂q).
Содержательно Δ Ψ (q) означает расстояние между целевой точкой r* и положением захвата r=Ф(q) в конфигурации q.
Рассмотрим кратко некоторые методы минимизации функционала (2.21). Зафиксируем целевую точку r* и начальное приближение q0. Тогда градиентный метод минимизации будет заключаться в построении минимизирующей последовательности q0, q1,q2 по правилу
 (2.22)
(2.22)Параметр λn называется длиной шага в направлении антиградиента - ΔΨ(qn). Если Δ Ψ (qn) ≠0, то шаг λn можно выбрать так, чтобы Ψ(qn+1)<Ψ (qn). Если Δ Ψ(qn)=0, то Ψ(qn)=0 и процесс (2.22) прекращается.
В зависимости от способа выбора шага λn можно получить различные варианты градиентного метода. Так, если λn выбирать из условия оптимальности
 (2.23)
(2.23)где αn=Ψ[qn-λΔΨ(qn)], λ ≥0, то придем к методу наискорейшего спуска [28]. Этот метод имеет простой геометрический смысл: точка qn+1 лежит на луче ln ={q:q =qn-λ Δ Ψ (qn),λ ≥0 в точке его касания поверхности уровня Qn+1 ={q∈Rm:Ψ(q)= Ψ(qn+1)}, причем сам луч 1n ортогонален к касательной поверхности уровня Q'n в точке qn.
Теоретические исследования и численные эксперименты показывают, что метод наискорейшего спуска для ряда кинематических схем роботов сходится медленно. Это связано с тем, что для многих манипуляционных роботов поверхности уровня функции обычно имеют так называемый овражий характер (2.21). Последнее означает, что по ряду переменных, образующих "склон оврага", даже небольшое изменение этих переменных приводит к резкому изменению значений функции, в то время как по остальным переменным, задающим "дно оврага", функция меняется незначительно.
Для ускорения сходимости иногда применяют метод Ньютона [28]. Если в градиентных методах при выборе направления убывания функции (2.21) используется лишь линейная часть ее разложения в ряд Тейлора, то в методе Ньютона используется квадратичная часть этого разложения. Возможность ускорения сходимости связана с тем, что квадратичная часть разложения аппроксимирует функцию гораздо точнее, чем линейная.
Метод Ньютона в задаче минимизации (2.21) имеет вид
 (2.24)
(2.24)где Ψ" - вторая производная функции Ψ по q.
Недостатком метода (2.24) является требование, чтобы начальное приближение q0 было достаточно близким к искомому решению q* = arg min Ψ(q). При отсутствии хорошего начального приближения алгоритм (2.24) может расходиться, поэтому метод Ньютона целесообразно применять в сочетании с методом наискорейшего спуска, который призван предварительно отыскать приемлемое начальное приближение. Трудоемкость каждого шага у метода Ньютона, вообще говоря, выше, чем у градиентных методов. Тем не менее общий объем вычислений, необходимых для минимизации (2.21) с требуемой точностью при применении этого метода, может оказаться меньше, чем при применении более простых градиентных методов.
Описанные методы решения уравнения (2.1) требуют для своей реализации вычисления первых и даже вторых производных функций вида (2.21). Однако существуют и другие методы решения этой задачи, использующие лишь значения функции (2.21) и не требующие вычисления ее производных. К ним относятся метод покоординатного спуска и метод случайного поиска [28, 69].
В явном виде метод покоординатного спуска определяется алгоритмом [68]
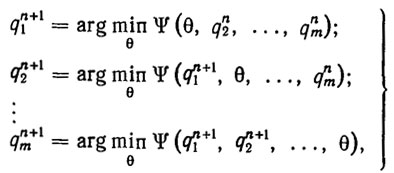 (2.25)
(2.25)где arg min Ψ (...,θ, ...) - такое значение θ, при котором Ψ имеет минимум по соответствующей переменной при фиксированных остальных. Обоснованием естественности алгоритма (2.25) для решения уравнения (2.1) являются некоторые особенности движения захвата манипулятора при изменении одной из его обобщенных координат: если меняется угловая координата, то захват движется по окружности; если меняется линейная координата, то захват движется по лучу. Эти соображения позволяют вычислить arg min Ψ в соотношениях (2.25) по элементарным формулам аналитической геометрии, что значительно упрощает реализацию метода покоординатного спуска.
Алгоритм (2.25) минимизирует функцию (2.21) с любой наперед заданной точностью δ. Скорость его сходимости слабо зависит от величины Ψ(q0), т. е. от выбора начального приближения q0. Другим достоинством алгоритма (2.25) является то, что он допускает свободный доступ к целенаправленному изменению обобщенных координат в процессе поиска решения. Это обстоятельство играет важную роль при автоматическом построении программных движений манипулятора с помощью алгоритма (2.25).
Наряду с описанными выше методами решения уравнения кинематики (2.1), существует большая группа алгоритмов поиска минимума функции (2.21), объединенных под названием метода случайного поиска. Этот метод характеризуется намеренным введением элемента случайности в алгоритм поиска, что увеличивает его гибкость. Многие алгоритмы метода случайного поиска можно представить в виде
 (2.26)
(2.26)где λn>0 - параметр; ωn - какая-либо реализация m-мерной случайной величины ω с известным законом распределения. В качестве координат ωi случайного вектора со можно брать, например, независимые случайные величины, равномерно распределенные на отрезке [-1,1] [28].
Реализация алгоритма (2.26) предполагает наличие специального генератора случайных чисел, который формирует вектор со. Такие генераторы, называемые также датчиками случайных чисел, обычно оформляются в виде стандартных программ для ЭВМ. Если закон распределения случайного вектора ω не зависит от номера шага n, то алгоритм (2.26) не может "нащупать" направления быстрого убывания минимизируемой функции, поэтому он сходится медленно.
Для увеличения эффективности метода случайного поиска желательно, чтобы в алгоритме (2.26) целенаправленно изменялся закон распределения ω в зависимости от номера шага и от результатов предыдущих шагов. Такой поиск, обеспечивающий большую вероятность выбора перспективных направлений ωr убывания функции (2.21), называется случайным поиском с обучением. По мере обучения роль фактора случайности уменьшается и алгоритм (2.26) направляет поиск по "хорошим" направлениям убывания функции (2.21). В то же время элемент случайности позволяет алгоритму (2.26) быстро "адаптироваться" к резкому изменению свойств функции Ψ (q) в районе поиска.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'