3.9. Автоматизация проектирования адаптивных систем программного управления
Проектирование и расчет адаптивных систем программного управления РТК представляет собой сложную и трудоемкую научно-техническую задачу. Одним из наиболее перспективных путей ее решения является создание проблемно-ориентированных систем автоматизированного проектирования (САПР) на базе современных средств вычислительной техники. Такие САПР благодаря использованию мощных ЭВМ, дисплеев, графопостроителей и интеллектуальных терминалов позволяют перейти от автоматизации эпизодических расчетов отдельных элементов систем управления РТК к комплексной автоматизации всего процесса проектирования в целом. В перспективе они должны обеспечить полную автоматизацию проектно-конструкторских работ. При этом полная автоматизация означает не исключение человека из творческого процесса проектирования, а освобождение его от всех рутинных и сложных вычислительных операций.
Важной особенностью развития САПР в последние годы является глубокое взаимопроникновение собственно конструкторского и технологических этапов проектирования. При ориентации проектов вновь создаваемых РТК на ГАП традиционная проектно-конструкторская документация, приспособленная к человеку, в значительной степени теряет свое значение. На первое место все шире выдвигается "безбумажная" документация на машинных носителях информации. Основное достоинство такой формы представления документации заключается в том, что ее можно непосредственно использовать для программного управления оборудованием ГАП, осуществляющим изготовление спроектированного РТК. Тем самым осуществляется постепенный переход к безбумажной технологии автоматизированного проектирования РТК вообще и их систем управления в частности.
САПР адаптивных систем программного управления представляет собой составную часть САПР адаптивных РТК. Последняя включает в себя много машинную вычислительную сеть и связанные с ней автоматизированные рабочие места (АРМ) конструкторов. Каждое АРМ снабжается дисплеем со световым пером и пультом с соответствующей клавиатурой. Это позволяет конструктору адаптивной системы управления работать в режиме диалога с ЭВМ, а также с конструкторами, ответственными за проектирование других систем РТК.
К проектированию адаптивной системы программного управления приступают после того, как определено назначение РТК, т. е. указаны целевые условия и основные режимы работы оборудования. На начальном этапе автоматизированного проектирования разрабатывается подробное техническое задание на систему управления с указанием основных целей и задач управления, технических характеристик, конструктивных ограничений, типовых режимов работы, условий эксплуатации, класса неопределенности, требований по надежности и т. п.
Исходная информация, содержащаяся в техническом задании, записывается в автоматизированный банк данных (АБД). В этом же банке содержится машинный архив уже известных систем программного управления - банк данных прототипов, который автоматически дополняется новыми системами управления по мере их проектирования. Описанный АБД представляет собой информационное обеспечение САПР систем управления РТК.
В соответствии с техническим заданием разрабатывается проект будущей адаптивной системы программного управления. На этом этапе выполняется большой объем теоретических исследований, направленных на выбор и обоснование принципов и алгоритмов адаптивного управления. В результате такого алгоритмического проектирования формируются алгоритмические модели перспективных проектов. Далее осуществляется сравнительный анализ разработанных моделей систем управления и имеющихся прототипов. При этом существенно используется ЭВМ, встроенная в автоматизированное рабочее место (АРМ): конструктор в режиме диалога с ЭВМ быстро выбирает рациональную структуру и рассчитывает параметры адаптивной системы программного управления, которая наилучшим образом удовлетворяет требованиям технического задания.
Основным принципом автоматизированного проектирования систем управления РТК является компоновка их из унифицированных программных модулей. Такой модульный принцип позволяет легко проектировать многочисленные модификации адаптивных систем программного управления на базе одних и тех же программных модулей, реализующих различные алгоритмы построения ПД, управления и адаптации, а также эстиматорные неравенства. При этом появляется возможность для каждого конкретного РТК осуществлять оптимальное комплексирование отдельных модулей в проектируемую систему.
Наилучший проект принимается как окончательное техническое решение о структуре адаптивной системы программного управления и режимах ее функционирования в РТК. На основании этого проекта конструируется мультимикропроцессорная система адаптивного программного управления РТК, ориентированная на работу в реальном времени, и создается соответствующее программное обеспечение. При этом алгоритмы адаптивного программного управления удобно записывать на языках высокого уровня (например, на языке PL/1), а затем транслировать их с помощью интерпретирующей программы в объектный код, задающий последовательность управляющих воздействий, которые подаются непосредственно на исполнительные приводы и механизмы РТК.
Описанная технология автоматизированного проектирования адаптивных систем программного управления РТК пока еще далека до завершения. Однако отдельные элементы САПР уже созданы и получают все большее распространение в практике проектирования адаптивных РТК. Это относится прежде всего к автоматизации программирования движений РТК по заданному технологическому процессу. Разработаны конструктивные и программные модули для сервоуправления заранее рассчитанным ПД, а также программные модули, реализующие некоторые алгоритмы адаптации и искусственного интеллекта.
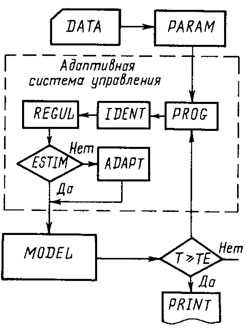
Рис. 3.3. Схема пакета программ, моделирующего адаптивные системы программного управления
Рассмотрим особенности и общие принципы автоматизированного проектирования адаптивных систем программного управления на примере САПР систем управления манипуляционных роботов. Основу САПР составляет пакет программ, позволяющий моделировать, как динамику широкого класса роботов с электрическими приводами, так и различные алгоритмы построения ПД и адаптивного управления ими.
Пакет программ имеет модульную структуру. Он содержит шесть основных функциональных модулей, а также ряд вспомогательных модулей и сервисных подпрограмм для организации режима диалога. Конструктор имеет возможность дополнять, заменять или корректировать отдельные модули и подпрограммы. Это придает САПР необходимую гибкость при переходе от имеющихся прототипов к проектам новых систем управления роботов.
Основными функциональными модулями пакета являются:
- программатор - модуль PROG;
- регулятор - модуль REGUL;
- эстиматор - модуль ESTIM;
- адаптатор - модуль ADAPT;
- идентификатор - модуль IDENT.
Эти модули программно реализуют на языках PL/1 и ФОРТРАН различные (в том числе и рассмотренные выше)алгоритмы построения ПД, синтеза управляющих воздействий, оценки качества переходных процессов, самонастройки параметров закона управления и идентификации параметров или состояний двигательной системы робота.
Структура рассматриваемого пакета программ представлена на рис. 3.3. Опишем кратко функции и назначение отдельных модулей и характер их взаимодействия.
Модуль DATA производит ввод технических данных проекта системы управления робота и условий экспериментов с ней на ЭВМ. К этим данным относятся: вектор параметров ξ двигательной системы робота; начальное состояние х(t0) робота; начальная оценка параметров τ0=τ(t0); класс неопределенности {Qξ, Qπ}; матрица коэффициентов усиления Г; параметр δ, характеризующий точность работы эстиматора; параметр θ, характеризующий быстродействие адаптатора; параметр целевого условия ε; конструктивные ограничения на состояния и управления; шаг интегрирования уравнений динамики; время эксперимента и др. В случае необходимости модуль DATA обеспечивает контрольную печать указанных данных или вывод их на экран дисплея.
Модуль PARAM служит для расчета параметров программатора, регулятора, эстиматора, адаптатора и идентификатора. В частности, он производит расчет элементов матрицы Г по заданному конструктором характеру переходных процессов.
Модуль PROG формирует ПД хp(t) и его производную хp(t) с учетом конструктивных ограничений и препятствий.
Модуль REGUL формирует закон управления приводами робота, отвечающий заданному режиму работы (стабилизация ПД, терминальное управление, самонаведение).
Модуль ESTIM служит для текущей оценки качества переходных процессов путем проверки эстиматорных неравенств. В случае нарушения этих неравенств включается модуль ADAPT.
Модуль ADAPT производит самонастройку закона управления, т. е. коррекцию параметров модуля REGUL, в соответствии с выбранным алгоритмом адаптации.
Модуль IDENT преобразует физические переменные z, измеряемые датчиками информационной системы, в вектор состояний х, используемый в модуле REGUL. Кроме того, он может осуществлять идентификацию вектора неизвестных параметров ξ.
Модуль MODEL производит имитационное моделирование управляемых движений робота путем численного интегрирования замкнутых уравнений динамики.
В состав пакета входит также ряд вспомогательных подпрограмм, осуществляющих, например, алгебраические операции над векторами и матрицами. Для обеспечения возможности проектирования в режиме диалога с ЭВМ конструктор имеет на своем рабочем месте дисплей и связанный с ним сервисный модуль - диалоговый корректор. Результаты расчетов и экспериментов могут выводиться на экране дисплея или печататься в виде таблиц и графиков, снабженных необходимыми комментариями.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'