3.10. Принципы построения и архитектура мультимикропроцессорных систем адаптивного программного управления
Технической базой для реализации адаптивных систем программного управления РТК является электронно-вычислительное оборудование вместе с соответствующим математическим обеспечением. Состав и конфигурация этого оборудования для конкретного РТК определяется в основном структурой и сложностью системы программного управления. Обычно система управления РТК имеет иерархическую структуру, включающую следующие уровни иерархии: 1) исполнительный (тактический); 2) координирующий (стратегический).
На исполнительном уровне осуществляется индивидуальное адаптивное программное управление отдельными роботами и станками, входящими в состав РТК. На координирующем уровне производится координация и синхронизация работы индивидуальных систем управления в соответствии с тем технологическим процессом, который должен быть автоматизирован с помощью РТК. Таким образом, речь идет, по существу, об организации группового адаптивного управления оборудованием РТК.
В качестве базовых вычислительных средств индивидуальных и групповой системы управления РТК целесообразно использовать микропроцессоры и микроЭВМ. Эти новые средства цифрового управления обладают функциональной гибкостью, высоким быстродействием, большим объемом памяти и надежностью. Они выгодно отличаются от универсальных ЭВМ низкой стоимостью, малыми габаритными размерами и простотой эксплуатации. Именно поэтому микропроцессоры и микроЭВМ находят все более широкое применение при аппаратно-программной реализации адаптивных систем программного управления РТК.
Рассмотрим сначала принципы и особенности построения индивидуальных систем управления оборудованием РТК на базе микропроцессоров и микроЭВМ. Прежде всего заметим, что в принципе такие системы можно реализовать на универсальных больших или мини-ЭВМ путем создания соответствующего программного обеспечения. Однако этот путь нерационален.
Дело в том, что использование современных дорогостоящих ЭВМ большой мощности для индивидуального управления одним станком или роботом было бы слишком расточительным: многие функциональные возможности таких универсальных ЭВМ при этом просто не нужны. Кроме того, последовательный принцип действия больших ЭВМ может приводить к значительному запаздыванию при вычислении адаптивного программного управления и, как следствие, к управлению по устаревшей информации. Для организации индивидуального управления в реальном времени целесообразно распараллелить вычислительные процессы путем распределения отдельных функций (алгоритмов) обработки информации и управления между микропроцессорами и микроЭВМ. Принципиальная возможность такого распараллеливания обеспечивается модульной иерархической структурой адаптивных систем программного управления, представленной на рис. 3.2. Аппаратно-программная реализация этой структуры сводится к конструированию мультимикропроцессорной системы (ММПС) индивидуального управления и разработке ее математического обеспечения.
Правильный выбор микропроцессоров и микроЭВМ в значительной степени определяет эффективность, гибкость и надежность ММПС управления. В связи с этим рассмотрим некоторые особенности современных микропроцессоров и микроЭВМ и перспективные варианты архитектуры адаптивных систем про-граммного управления на их основе.
Микропроцессор представляет собой большую интегральную схему (БИС), функциональные возможности которой эквивалентны схеме, содержащей десятки тысяч обычных дискретных элементов (транзисторов, резисторов и т. п.). Гибкость и универсальность микропроцессора обеспечивается тем, что реализуемые им арифметические и логические операции задаются программным путем. Отечественной промышленностью выпускаются микропроцессоры различных серий: К580, К589 и т. д.
На базе микропроцессоров создаются специализированные микропроцессорные модули (МПМ), представляющие собой функционально законченные и конструктивно оформленные на одной плате устройства, состоящие из микропроцессора и вспомогательных, микросхем (интерфейсные схемы, обеспечивающие связь микропроцессора с внешними устройствами, цифроаналоговые и аналого-цифровые преобразователи, БИСы постоянной и перепрограммируемой памяти, контроллеры прерываний и прямого доступа в память и т. д.).
Важный класс МПМ, ориентированных на задачи управления, составляют программируемые контроллеры (ПМК). Они работают в реальном времени в соответствии с алгоритмами, которые предварительно записываются в их постоянное запоминающее устройство. Наибольшее распространение в ГАП находят ПМК двух типов [95, 98-100]:
- программируемые логические микроконтроллеры, служащие для реализации логических алгоритмов и замены различных релейных и логических схем электроавтоматики;
- программируемые регулирующие микроконтроллеры, служащие для реализации алгоритмов управления и замены различных аналоговых и цифровых регуляторов.
Преимущества таких ПМК по сравнению с обычными электронными схемами с жесткой (неизменной) структурой заключаются в высокой гибкости, универсальности и надежности. В развитых капиталистических странах более 80 фирм выпускают около 150 моделей логических и регулирующих ПМК. Эти ПМК уже применяются в 35 % автоматизированных систем управления технологическими процессами [95].
Появление и широкое использование регулирующих ПМК вместо традиционных жестких регуляторов аналогового или цифрового типов знаменуют собой новый шаг в совершенствовании средств управления. В связи с этим принципиально изменяется даже сама методология конструирования систем автоматического управления: она основывается на автоматизированном проектировании и программировании этих систем с записью необходимых управляющих программ в постоянное запоминающее устройство.
Каждый регулирующий ПМК может заменить несколько десятков обычных П-, ПИ- и ПИД-регуляторов аналогового или цифрового типа. Он позволяет программно реализовать весьма сложные алгоритмы оптимального и адаптивного управления роботами и технологическим оборудованием. Поэтому появление регулирующих ПМК можно рассматривать как важную предпосылку и стимул к развитию адаптивных систем программного управления РТК*
В СССР выпускается несколько разновидностей регулирующих ПМК: "Ремиконда", КТС ЛИУС-2, ПС-320 и др. Опишем их особенности на примере ПМК "Ремиконда" [95]. Этот ПМК реализован на базе 8-разрядного отечественного микропроцессора К580. Его управляющие программы записываются в постоянное полупроводниковое запоминающее устройство на заводе-изготовителе. Библиотека программ включает более 20 унифицированных процедур: аналоговые и дискретные законы ПИД-регулирования; операции суммирования, умножения, дифференцирования, интегрирования и т. п.; нелинейные преобразования и т. д. Комбинируя эти процедуры, можно строить достаточно сложные (в том числе и адаптивные) законы управления. Оперативная память данного ПМК разделена на две части. Первая используется для расчета коэффициентов усиления ПИД-регуляторов и хранения промежуточных результатов, а вторая - для коррекции (самонастройки) варьируемых параметров.
ПМК "Ремиконда" имеет 64 аналоговых и 128 дискретных входных каналов и 64 выходных канала, причем опрос аналоговых датчиков производится мультиплексором под управлением микропроцессора. Поэтому на базе этого ПМК можно конструировать сложные многоканальные адаптивные регуляторы для РТК. Каждый управляемый канал имеет восемь аналоговых и дискретных входов и два выхода - аналоговый, сопрягаемый с исполнительным приводом, и дискретный, свидетельствующий о нарушении конструктивных ограничений на управлении.
Важным достоинством ПМК типа "Ремиконда" является то, что программирование режимов работы осуществляется непосредственно на технологическом объекте, которым они управляют, при помощи одной клавишной панели оператора без привлечения других программных или аппаратных средств отладки. Эти ПМК имеют только внутреннее программное обеспечение и не требуют громоздких операционных систем, трансляторов и т. п.
В состав программного обеспечения входят программа-диспетчер, управляющие, обслуживающие и диагностические программы. Программа-диспетчер координирует весь процесс управления в реальном времени, т. е. задает последовательность выполнения управляющих программ или их фрагментов. Обслуживающие программы обеспечивают диалоговое взаимодействие оператора с клавишным пультом, снабженным цифровыми индикаторами и светодиодами для отображения запрошенной информации. Диагностические программы, контролируя безотказность работы аппаратных и программных средств, сигнализируют о неисправности того или иного блока и заменяют этот блок резервным.
Применение ПМК типа "Ремиконда" оправдано в тех случаях, когда число каналов управления не меньше б, поэтому они могут использоваться в качестве индивидуальных систем управления роботов, станков и обрабатывающих центров.
Функции логического и регулирующего ПМК совмещены в комплекс технических средств для локальных информационных управляющих систем (КТС ЛИУС), разработанный отечественной промышленностью в составе государственной системы промышленных приборов и средств автоматизации [95]. В качестве элементной базы КТС ЛИУС-2 используются 8-разрядные микропроцессоры К580 и унифицированные микросхемы с повышенной степенью интеграции ("Микродат"), обеспечивающие обмен данными, хранение программ, преобразование информации от датчиков и т. п. Для КТС ЛИУС-2 разработано базовое программное обеспечение, включающее средства автоматизации программирования. В качестве языков программирования используются ассемблер и БЕЙСИК.
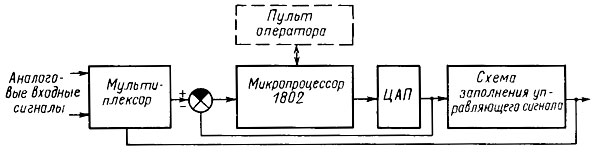
Рис. 3.4. Структурная схема микропроцессорного регулятора серии 5260
ПМК для автоматического управления технологическим оборудованием широко используются за рубежом. Ряд фирм освоили серийный выпуск регулирующих ПМК типа ТДС-2000 (фирма "Ханивелл" (Honeywell), "Тосдие-200" (Tosdie-200), фирма "Тошиба" (Toshiba), "Элине" (Eline), "Унитрол" (Unitrol), фирма "Хитачи" (Hitachi) и др. [95, 99]. Среди них значительный интерес для локального адаптивного управления оборудованием РТК представляет микропроцессорный регулятор типа 5260-R фирмы "Тейлор Инструменте" (Taylor Instruments). Структурная схема этого ПМК представлена на рис. 3.4. Регулятор сопрягается с датчиками аналоговых сигналов через мультиплексор. Эти сигналы поступают на блок сравнения (компаратор), на другой вход которого поступают аналоговые программные сигналы-уставки, снимаемые с цифроаналогового преобразователя (ЦАП). Эти программные уставки формируются микропроцессором типа RCA-1802, который производит также преобразование аналогового сигнала преобразования в цифровую форму.
В микропроцессоре регулятора программно реализовано большое число (около 200) различных алгоритмов управления, включая законы ПИД-регулирования и алгоритмы самонастройки параметров регулятора [95]. Главным преимуществом такого микропроцессорного регулятора по сравнению с обычным аналоговым регулятором является возможность автоматического выбора структуры и настройки параметров любого закона управления из заданного множества программно-реализованных алгоритмов, тогда как в аналоговом регуляторе алгоритм управления реализуется аппаратно и поэтому не может быть изменен.
Рассмотренные МПМ и, в частности, ПМК обладают широким спектром функциональных возможностей, поэтому на их основе можно создавать сложные мультимикропроцессорные системы (ММПС) адаптивного программного управления оборудованием РТК. Однако конструирование таких ММПС наталкивается на трудности, связанные с тем, что каждая индивидуальная ММПС управления должна разрабатываться как новое аппаратно-программное изделие, обеспечивающее совместимость с другими системами управления РТК по шине и системе команд. Для ускорения разработки ММПС зачастую нужны специальные средства автоматизации программирования, проектирования и отладки, которые, в свою очередь, представляют собой совокупность проблемно-ориентированных аппаратных и программных средств.
Альтернативой МПМ и сложным ММПС на их основе является программная реализация адаптивных систем управления на базе универсальных микроЭВМ, имеющих модули связи с объектом управления. Автоматизация проектирования адаптивных систем программного управления требует использования мощных операционных систем, поэтому микроЭВМ должна иметь большой объем оперативной памяти и содержать постоянные и перепрограммируемые запоминающие устройства, служащие для хранения программных модулей, реализующих алгоритмы обработки информации и управления. Другим важным требованием, предъявляемым к управляющим микроЭВМ, является то, что они должны осуществлять адаптивное управление оборудованием РТК в реальном масштабе времени.
Отечественной промышленностью серийно выпускается ряд, микроЭВМ. Среди них наибольшее распространение в индивидуальных системах программного управления получили микроЭВМ "Электроника-60" и НЦ80-20/3. Производительность этих микроЭВМ лишь в 2-3 раза меньше, чем производительность мини-ЭВМ типа СМ-4, а стоимость меньше на порядок. Другим их достоинством является совместимость системы команд и интерфейсов с системой команд и интерфейсами мини-ЭВМ серии СМ, а также с перспективными моделями микро- и мини-ЭВМ, выпуск которых осваивается промышленностью. Благодаря такой программной совместимости разработку программного обеспечения индивидуальных систем адаптивного управления оборудованием РТК на основе микроЭВМ можно осуществлять с использованием возможностей и средств мини-ЭВМ. При этом уже разработанное и отлаженное программное обеспечение для управляющей микроЭВМ (например, для "Электроники-60") не требует переделки при переходе к следующей, более совершенной модификации (например, к микроЭВМ НЦ-80-31).
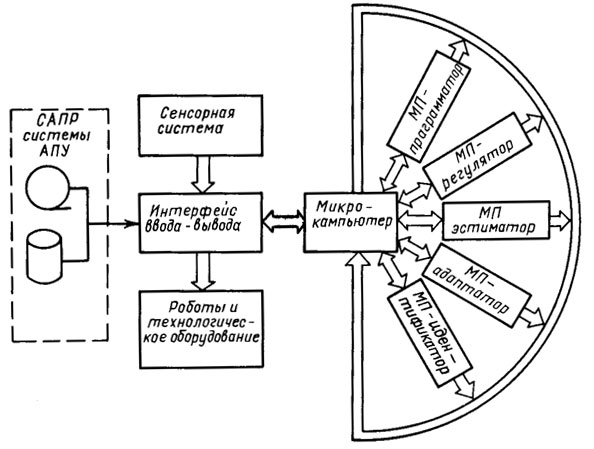
Рис. 3.5. Архитектура мультимикропроцессорной системы адаптивного управления
Наряду с рассмотренными вариантами реализации адаптивных систем программного управления оборудованием РТК на базе ММПС (аппаратная реализация) и в виде программного обеспечения для микроЭВМ (программная реализация), представляет интерес и компромиссный вариант аппаратно-программной реализации. В этом варианте система управления строится на базе микроЭВМ и нескольких микропроцессоров, связанных общей информационной шиной. Архитектура такой комбинированной ММПС адаптивного программного управления имеет вид, представленный на рис. 3.5. На микроЭВМ возлагаются следующие основные функции:
- программируемая обработка информации от интерфейса ввода-вывода;
- программно-управляемый обмен информацией между микроЭВМ и микропроцессорными модулями через общую шину данных;
- координация работы микропроцессорных модулей;
- решение отдельных трудоемких задач вычислительного характера (оптимизация ПД, расчет параметров регулятора и т. п.).
Специализированные микропроцессорные модули (МПМ) решают следующие задачи:
- построение программы движения (МПМ-программатор);
- оценка качества управления (МПМ-эстиматор);
- коррекция параметров регулятора (МПМ-адаптатор);
- формирование закона управления (МПМ-регулятор).
Все эти данные МПМ связаны с микроЭВМ, а также (через общую шину данных) между собой. В основе их работы лежат алгоритмы адаптивного программного управления, описанные выше. Схема вычислений на одном такте цифрового адаптивного управления представлена на рис. 3.6.
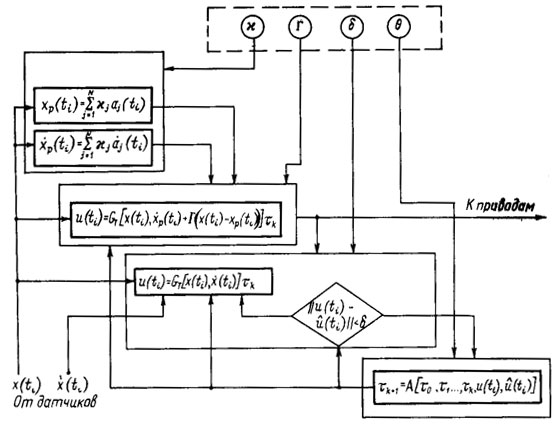
Рис. 3.6. Схема расчета на одном такте адаптивного программного управления
Основным достоинством предложенной архитектуры является возможность алгоритмического распараллеливания процесса вычисления адаптивного программного управления - от формирования ПД до подачи управляющих воздействий на исполнительные приводы и механизмы робота или станка. Благодаря этому естественным образом распараллеливается и процесс проектирования системы, что позволяет конструктору производить расчет и реализацию каждого микропроцессорного модуля в отдельности.
Функциональные возможности микроЭВМ и специализированных МПМ определяются их программным обеспечением, т. е. пакетом программ, реализующих соответствующие алгоритмы адаптивного управления. Подобно аппаратной структуре программное обеспечение ММПС рассматриваемого типа имеет иерархическую структуру.
Цифровые адаптивные системы программного управления роботов, реализуемые на базе микроЭВМ и микропроцессоров, принципиально отличаются от обычных систем индивидуального программного управления оборудованием РТК. Во-первых, они обеспечивают (при соответствующем выборе структуры и параметров программатора, эстиматора, адаптатора и регулятора) асимптотическую устойчивость ПД в целом, в то время как локальные системы программного управления в лучшем случае обеспечивает лишь устойчивость ПД в малом (последнее означает, что работоспособность РТК сохраняется лишь при небольших отклонениях реального и программного движений). Во-вторых, цифровая адаптивная система управления способна обеспечить желаемый характер переходных процессов при любом уровне параметрической неопределенности и внешних возмущений, а системы программного управления адаптивны лишь при достаточно малых возмущениях. Вследствие этого качество и надежность индивидуальных систем адаптивного управления существенно выше, чем у аналогичных систем программного управления.
Все это говорит о несомненных преимуществах адаптивных систем управления роботами и технологическим оборудованием РТК по сравнению с традиционными системами программного управления. И хотя реализация таких более совершенных систем наталкивается на известные трудности, она вполне осуществима уже сегодня на базе современных микроЭВМ и микропроцессоров. Тем самым открывается реальная перспектива создания станков и роботов второго и третьего поколений, обладающих высокоразвитой способностью адаптации к заранее неизвестным и меняющимся условиям эксплуатации.
Для обеспечения работоспособности РТК в не детерминированной производственной обстановке нужно не только построить индивидуальное ММПС адаптивного программного управления оборудованием, но и скоординировать их работу в соответствии с заданным технологическим процессом. Этот процесс по существу определяет алгоритм (а значит, и ритм) функционирования РТК. Его можно представить как последовательность отдельных технологических и вспомогательных операций: подвоз палет с заготовками и инструментом, загрузку оборудования, выполнение запланированных технологических операций, контроль параметров деталей, выгрузку и транспортировку изделий на склад и т. д. Выполнение любой из этих операций требует согласованной работы определенной части оборудования РТК. Это значит, что нужно своевременно подключать роботы и технологическое оборудование, обеспечивающее выполнение очередной операции в соответствии с заранее рассчитанными ПД, контролировать режимы их работы и отключать аппаратуру РТК после того, как она выполнит свои функции. Иными словами, нужна координация и синхронизация работы всего оборудования РТК в автоматическом режиме.
Функции координации возлагаются на специальную ЭВМ-координатор, в качестве которой обычно используется микроЭВМ. В ряде случаев координатор вместе с индивидуальными системами адаптивного управления РТК может быть реализован на базе децентрализованных систем ПМК типа КТС ЛИУС-2, "Ремеконд", ПС-320, ТДС-2000 и т. п. [95].
Для типовой двухуровневой структуры мультипроцессорной системы группового управления РТК характерно наличие общей шины данных, к которой подключены, с одной стороны, микроЭВМ стратегического (координирующего) уровня, а с другой - индивидуальные ММПС адаптивного управления роботами и технологическим оборудованием тактического (исполнительного) уровня. Последние могут взаимодействовать друг с другом с целью обмена текущей информацией и координации своих действий в интересах решения глобальной технологической задачи, возложенной на РТК.
Описанная система группового управления по существу представляет собой локальную вычислительную сеть. Структура сети обеспечивает гибкость управления и возможность автономного изменения режимов работы и ПД отдельных единиц оборудования РТК. Это осуществляется с помощью специальной программы- диспетчера координирующей микроЭВМ, которая выполняет следующие основные функции.
- Формирование команд (директив) на включение, выключение или выбор режима работы оборудования. Эти команды имеют безусловный характер, диктуемый заданным технологическим процессом. При этом простые команды управляют работой одного станка или робота, а сложные обобщенные команды координируют одновременную работу нескольких единиц оборудования РТК.
- Формирование условных команд на исполнение технологических операций с соблюдением заданной системы ограничений. Команды обычно сопровождаются блокировкой, обеспечивающей защиту от ошибочного или преждевременного выполнения особо ответственных команд. Блокировка автоматически снимается по мере выполнения соответствующих условий.
- Привязка ПД отдельных единиц оборудования к общей программе работы РТК. Результатом такой привязки является формирование определенной последовательности команд, координирующей "запуск" необходимых ПД с помощью таймеров.
- Отображение на пульте управления информации о работе отдельных единиц оборудования и о текущем динамическом состоянии РТК в целом. Это позволяет, в частности, предупредить приближение аварийных ситуаций.
Таким образом, программа-диспетчер формирует целевые задания всем единицам оборудования РТК и передает их индивидуальным ММПС адаптивного управления. Вследствие этого координирующая микроЭВМ как бы не участвует непосредственно в управлении оборудованием, а оборудование работает в значительной степени автономно.
Адаптационные возможности и уровень интеллекта индивидуальных ММПС управления могут колебаться в широких пределах. Некоторые из них могут только принимать простейшие решения типа "старт-стоп", а другие могут автоматически корректировать ПД, настраивать параметры законов управления, анализировать качество работы, диагностировать неисправности отдельных узлов (например, износ или поломку инструмента), распознавать палеты или заготовки в них, самостоятельно выбирать нужный инструмент, оснастку и программу обработки и т. д. Спектр функций адаптивного РТК определяется, главным образом, тем алгоритмическим и программным обеспечением, которое реализовано в его системе управления.
Резюмируя вышеизложенное, отметим, что использование ММПС адаптивного программного управления придает РТК принципиально новые свойства и преимущества по сравнению с обычными системами числового программного управления. Переход к адаптивному управлению позволяет существенно повысить автономность РТК, что особенно важно в условиях ГАП с безлюдной технологией. С помощью микроЭВМ и микропроцессоров в РТК реализуются не только функции автоматического программирования движений и адаптивного управления приводами, но и ряд дополнительных функций интеллектуального характера. Среди них важнейшими являются автоматический контроль и диагностика работы оборудования, автоматическая замена неисправных элементов, распознавание и автоматическое адресование деталей, фильтрация сигналов обратной связи от помех и т. п. Все это позволяет существенно расширить адаптационные и интеллектуальные возможности систем управления РТК, резко улучшить качество управления и повысить его надежность.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'