5.4. Адаптивное управление роботом с шаговыми двигателями
Электрические шаговые двигатели являются одним из наиболее перспективных типов исполнительных двигателей для роботов и РТК. Их достоинствами являются возможность непосредственного цифрового управления от ЭВМ, высокое быстродействие и большой вращающий момент.
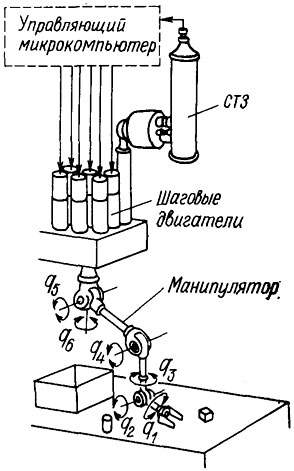
Рис. 5.7. Макет робота-манипулятора с шаговыми приводами
Рассмотрим методику алгоритмического синтеза и опыт программной реализации на ЭВМ адаптивной системы управления манипулятором с шаговыми приводами. Эффективность этой системы по сравнению с традиционными системами программного управления иллюстрируется экспериментальными данными, полученными при ее испытаниях в составе манипуляционного робота, изображенного на рис. 5.7. Этот робот оснащен телевизионной системой зрения на базе промышленной телевизионной установки ПТУ-102, позволяющей воспринимать и анализировать обстановку в рабочей зоне. Благодаря этому обеспечивается принципиальная возможность адаптации к изменяющейся производственной обстановке, в частности, оказывается возможным манипулирование деталями без их предварительного ориентирования и позиционирования.
Основное препятствие на пути широкого применения систем программного управления разомкнутого типа связано с известным эффектом "потери шагов" шагового двигателя. Этот эффект часто возникает в режимах разгона и торможения, когда момент нагрузки может превышать движущий момент двигателя. Он особенно характерен для шаговых приводов манипуляционных роботов, поскольку моменты нагрузки на каждом из двигателей манипулятора существенно зависят от его текущей конфигурации, а основными режимами работы являются разгон и торможение.
Для улучшения качества управления шаговыми приводами роботов целесообразно использовать позиционную обратную связь. Достоинством такой замкнутой импульсной системы программного управления по сравнению с разомкнутой является более высокая помехоустойчивость и стабильность работы в широком диапазоне изменяющихся нагрузок.
Точность работы замкнутых систем программного управления шаговыми двигателями существенно зависит от точности датчиков обратной связи, от упругих деформаций в кинематических передачах, от неконтролируемых параметрических и внешних возмущений. Как показали эксперименты на лабораторном образце робота с шаговыми приводами, точность позиционирования манипулятора существенно снижается при больших моментах нагрузки на выходных валах двигателей, а в некоторых режимах наблюдаются автоколебания. Эти факты находятся в полном согласии с результатами сравнительного анализа влияния параметрических возмущений на динамику манипуляционных роботов для различных систем программного управления, приведенного в п. 5.1. Они свидетельствуют о том, что улучшение качества управления при одновременном расширении диапазона допустимых нагрузок может быть достигнуто путем перехода к адаптивному управлению шаговыми приводами.
Переходя к описанию адаптивной системы программного управления роботом, заметим, что описанные выше алгоритмы контурного и позиционного управления непрерывного типа непосредственно не применимы для управления шаговыми приводами. Поэтому прежде всего опишем дискретную модификацию алгоритмов адаптивного управления, учитывающую импульсный характер работы шаговых приводов.
В качестве конкретного объекта управления служил манипулятор с шаговыми двигателями, изображенный на рис. 5.7. Лабораторный образец этого робота был создан в ЦНИИРТК при Ленинградском политехническом институте им. М. И. Калинина на базе манипулятора типа МЭМ-10М с шестью степенями свободы, в котором силовые сельсины заменены шаговыми двигателями типа ШД-5 [42, 63]. Последние работают от схемы четырехтактной коммутации с импульсной форсировкой.
Управление шаговыми двигателями манипулятора осуществлялось от ЭВМ М-6000. Для организации обратной связи использовались потенциометрические датчики положения, вмонтированные в шарниры манипулятора, и датчики моментов на выходных валах приводов. Кроме того, для "очувствления" схвата манипулятора использовались тактильные и локационные датчики. Связь шаговых двигателей с манипулятором осуществляется через дифференциальную систему передач. Конфигурация манипулятора в каждый дискретный момент времени k определяется вектором обобщенных координат q=|qi,k|i=1, k = 0, 1, 2, ..., на компоненты которого наложены конструктивные ограничения вида
 (5.25)
(5.25)
Углы поворота vk выходных валов шаговых приводов определяются величиной управляющего воздействия vk на входе двигателя и величиной Nk силовой обратной связи с манипулятором через дифференциальную систему передач. Последняя определяет некоторую жесткую функциональную зависимость между величинами vk и qkt определяемую некоторой невырожденной матрицей передаточных отношений Р. Через дифференциальную систему передач на исполнительные приводы подается нагрузка.
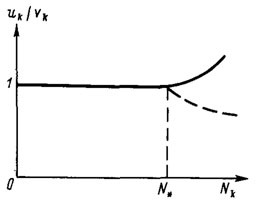
Рис. 5.8. Динамическая характеристика шаговых двигателей
Моменты нагрузки 
зависящие от конфигурации манипулятора, масс и длин его звеньев, определяются по известным формулам [42, 63].
Работа каждого двигателя под действием управления uk,i и нагрузки Nk,ii приближенно описывается соотношениями [63]:
 (5.26)
(5.26)где N*,i - моменты приемистости двигателей; di - параметры двигателей.
Характер зависимости uk/vk (отношение командного управления uk к фактически отработанному управлению vk) от нагрузки Nk по каждой обобщенной координате представлен на рис. 5.8. Согласно графику, при | Nk,i|≤N*,i имеет место равенство
 (5.27)
(5.27) что соответствует идеальной работе двигателей независимо от нагрузки Nk,i на их выходных валах. При |Nk,i|>N*,i величина vk,i либо больше uk,i (в случае, если направление момента нагрузки Nk,i совпадает с направлением вращения i-го двигателя под действием управления uk,i), либо меньше uk,i (в случае, если направление момента нагрузки Nk,i и вращения i-го двигателя противоположны). Поэтому при моментах нагрузки Nk,i, превышающих по абсолютной величине моменты приемистости двигателей N*,i, возникает необходимость в коррекции управления таким образом, чтобы парировать "потерю шагов" двигателей и обеспечить требуемую точность позиционирования или отработки программной траектории.
Однако заранее рассчитать приемлемый закон коррекции управления в изменяющихся условиях не представляется возможным. Это связано с тем, что моменты нагрузки на выходных валах двигателей существенно зависят от моментов инерции груза, параметров двигателей и манипулятора, которые могут непредсказуемо изменяться в широком рабочем диапазоне. Поэтому не адаптивный подход к синтезу управления при больших нагрузках на выходных валах шаговых двигателей оказывается неэффективным. Это диктует необходимость введения специальных элементов (алгоритмов) адаптации в систему программного управления, обеспечивающих ее автоматическое приспособление к заранее неизвестным и изменяющимся условиям эксплуатации робота.
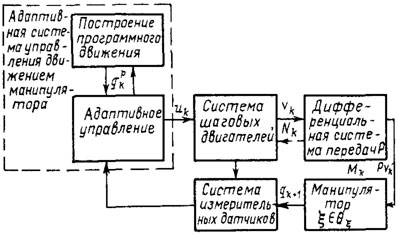
Рис. 5.9. Схема адаптивного управления шаговыми приводами манипулятора
На рис. 5.9 представлена общая схема адаптивной системы программного управления манипулятором с шаговыми приводами рассматриваемого типа. Эта система функционирует следующим образом. Вначале рассчитывается программная траектория qpk, k= 0, 1, ..., в соответствии с одним из методов, описанных в гл. 2. Как показали эксперименты на макете, при небольших (до 2 кг) нагрузках в схвате программная траектория отрабатывается достаточно точно. Увеличение нагрузки приводит к существенному снижению точности отработки, к автоколебаниям или даже к выходу манипулятора (по отдельным координатам) на ограничения. Поэтому нарушение условия |Nk,i|≤N*,i хотя бы по одной из обобщенных координат является сигналом для перехода в режим адаптации.
Переходя к рассмотрению этого режима, запишем уравнения управляемого движения манипулятора с шаговыми приводами в виде:

 (5.28)
(5.28)где ci - параметры, характеризующие конструктивные ограничения по i-й обобщенной координате.
Разрешим это уравнение относительно управления uk и подставим в полученные соотношения вместо qk+1 величины qpk+1 задающие программную траекторию. Тогда получим идеальный закон управления, который в принципе гарантирует точную от-работку программной траектории. Однако воспользоваться этим законом нельзя, так как он зависит от неизвестных характеристик шаговых двигателей (величины di, N*,i), от параметров манипулятора и груза (величины mi, ri, li). Тем не менее явный вид идеального управления полезен - он подсказывает общий вид (структуру) законов управления, в классе которых следует синтезировать адаптивное программное управление.
В рассмотренном случае идеальный закон управления имеет вид
 (5.29)
(5.29)где Gi1u, ξ - некоторые заданные вектор-функции, явный вид которых приведен в работах [42, 631. На основании закона (5.29) управление шаговыми приводами манипулятора в адаптивном режиме определим формулой [631
 (5.30)
(5.30)
где τk,i - настраиваемые параметры, трактуемые как оценки неизвестного вектора параметров ξ идеального закона управления (5.29).
В качестве алгоритма настройки параметров, представляющего собой алгоритм адаптации, можно взять рекуррентный или много шаговый оптимальный алгоритм решения системы эстиматорных неравенств вида
 (5.31)
(5.31)Нетрудно убедиться, что неравенства (5.31) разрешимы с "запасом" δ (при τi=ξi) и что из выполнения этих неравенств, заданных в пространстве управлений, следует выполнение целевых неравенств, заданных в терминах обобщенных координат, а именно:
 (5.32)
(5.32)где ε=ε(δ) - положительные параметры, характеризующие точность осуществления программной траектории.
Приведем явную формулу локально-оптимального рекуррентного алгоритма адаптации 1421:
 (5.33)
(5.33)где τ0,i - произвольные начальные оценки неизвестных параметров. Эти алгоритмы гарантируют решение эстиматорных неравенств (5.31), а следовательно, и целевых неравенств (5.33) после конечного числа коррекций параметров адаптивного закона управления (5.30).
Таким образом, синтезированный адаптивный закон управления (5.30), (5.33), использующий обратную связь по текущим положениям qk манипулятора и информацию о заданной программной траектории qpk+1 обеспечивает после некоторого периода адаптации требуемую близость реальной и программной траекторий.
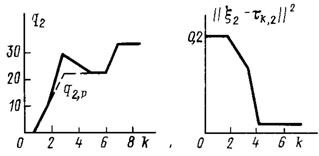
Рис. 5.10. Переходные процессы по координате q2
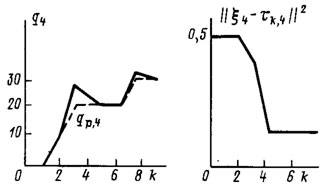
Рис. 5.11. Переходные процессы по координате q4
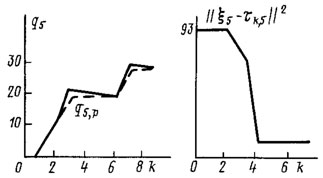
Рис. 5.12. Переходные процессы по координате q5
Эффективность предложенного алгоритмического обеспечения для адаптивной системы управления шаговыми приводами манипулятора проверялась путем моделирования на ЭВМ. При этом расчет числа управляющих импульсов nk,i на входе каждого двигателя осуществляется по формуле
 (5.34)
(5.34)
где hi-шаг i-го двигателя. Распределение управляющих импульсов во времени программно осуществлялось так, чтобы отработка всех управляющих воздействий uk,i (или nk,i), i= 1, ..., 6 заканчивалась одновременно.
Моделировались управляемые движения манипулятора, соответствующие последовательному перемещению схвата из одной точки рабочего пространства в другую, а также движение по заданной траектории ("поиск, взятие и перенос деталей", "точечная сварка по контуру" и т. п.). Рассмотрим некоторые типичные эксперименты.
В первом эксперименте требовалось перевести манипулятор вместе с помещенным в схват грузом (масса груза 5 кг) в три последовательных положения q(1)=(10, 10, 10, 10, 10, 10)T, q(2)=(20, 20, 20, 20, 20, 20)T, q(3)=(30, 30, 30, 30, 30, 30)T с точностью ε= 0,1 (величины обобщенных координат задавались в градусах). Параметры m0, mi, li, di, ri, N*,i i = 1, ..., 6, груза, манипулятора и шаговых приводов считались либо приближенно известными, либо неизвестными.
На рис. 5.10-5.12 представлены графики (жирная линия) траекторий манипулятора по второй, четвертой и пятой обобщенной координатам (в рассматриваемом эксперименте именно по этим координатам осуществлялась адаптивная коррекция параметров управления). На тех же рисунках графики справа характеризуют собственно процесс адаптации по этим обобщенным координатам в терминах изменения расстояния от вектора текущей оценки параметров τk,i адаптивного управления до неизвестного вектора параметров ξi идеального закона управления. Как видно из этих графиков, в процессе отработки программной траектории по каждой обобщенной координате было сделано не более четырех коррекций управления.
В другой серии экспериментов моделировался процесс точечной сварки по контуру. Так, в одном из экспериментов требовалось перевести схват последовательно в шесть точек, расположенных на окружности. При использовании сварочной головки массой 2 кг реализовывался не адаптивный режим управления, характеризующийся тем, что |Nk,i|≤N*,i по всем обобщенным координатам. В этом случае система управления осуществила периодическое перемещение схвата манипулятора во все шесть заданных позиций с точностью ε=1 мм. По мере увеличения нагрузки в схвате до 5 кг реализовывался адаптивный режим управления, для которого |Nk,i|>N*,i хотя бы по одной обобщенной координате. При точности позиционирования ε= 1 см произошло не более двух коррекций управления по различным обобщенным координатам, а при точности ε= 1 мм - не более четырех коррекций. Дальнейшее увеличение нагрузки в схвате манипулятора приводило либо к увеличению числа коррекций адаптивного управления (до нескольких десятков коррекций), либо к нарушению конструктивных ограничений на управление.
В целом результаты моделирования адаптивной системы программного управления шаговыми двигателями манипуляционного робота свидетельствуют о ее эффективности и возможности простой программно-аппаратной реализации на базе управляющих микроЭВМ или микропроцессоров. Введение элементов (алгоритмов) адаптации в систему программного управления расширяет функциональные возможности и повышает надежность роботов с шаговыми приводами.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'