1. Конструктивно-кинематические и технологические параметры ПР
ПР являются принципиально новым видом оборудования, поэтому их конструктивные, кинематические и технологические параметры рассматриваются на примере лучших образцов, используемых в нашей стране и за рубежом. На основе анализа конструкций 500 моделей ПР можно сделать следующие выводы. Наибольшее число ПР работает в полярных цилиндрических координатах, о чем свидетельствуют данные табл. 1.1, в которой приведены примеры структурных кинематических схем ПР.
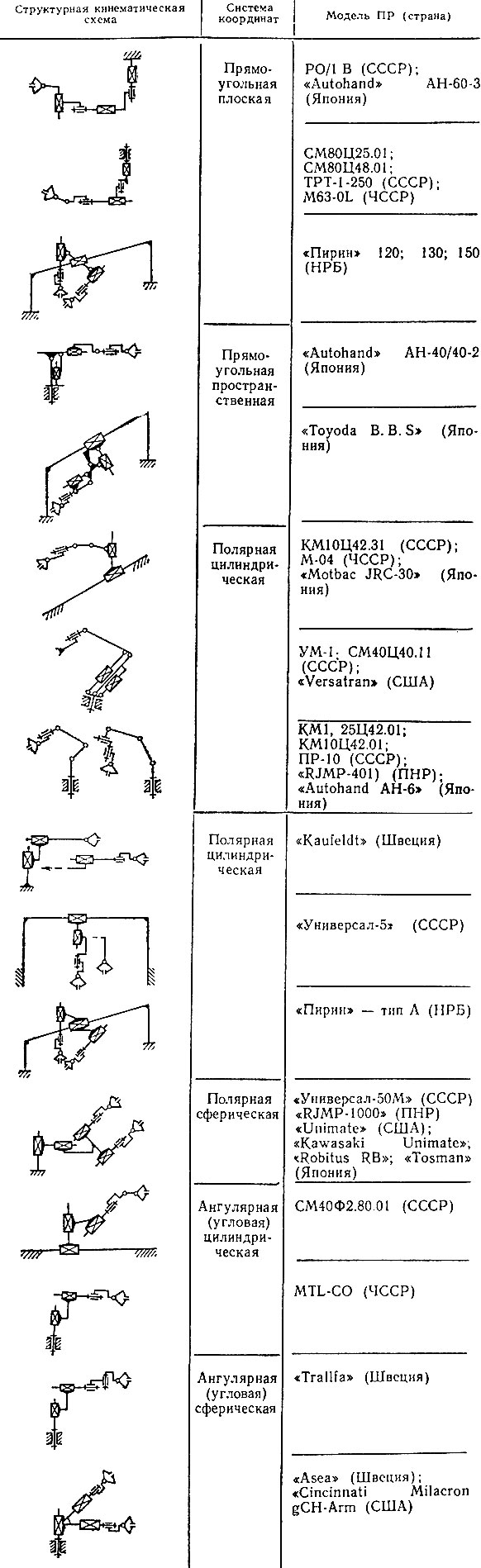
Таблица 1.1. Примеры структурных кинематических схем ПР
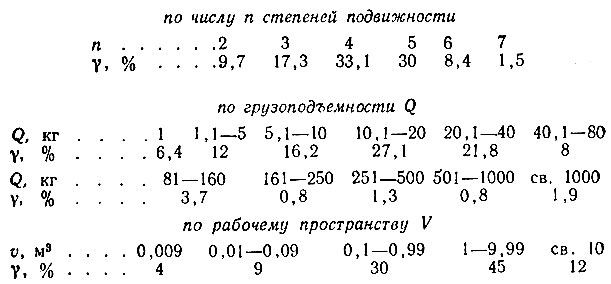
Распределение ПР, т. е. доля (γ) ПР в их общей численности:
Скорость линейных перемещений рабочих органов у отдельных ПР достигает 5 м/с, но для большинства ПР она составляет 0,5-1,5 м/с; скорость угловых перемещений 60-180 град/с. Быстродействие ПР в ряде случаев повышают применением пневмопривода, увеличением числа рук ПР, оснащением ПР многопозиционными захватными устройствами, а также механизмами, выполняющими дополнительные операции в процессе транспортирования детали.
Погрешность позиционирования ПР от ±4 до ±0,02 мм, при этом для 70% ПР ша находится в пределах ±1 мм.
Около 40 % современных ПР имеют упрощенную конструкцию (для каждой руки n = 2÷4) и оснащены позиционной системой ЧПУ. В то же время растет число ПР, имеющих расширенные кинематические возможности; прежде всего это относится к ПР, работающим в ангулярной (угловой) цилиндрической и сферической системах координат.
Увеличивается число специализированных ПР, предназначенных для обслуживания широкой номенклатуры оборудования одного технологического назначения. В целях расширения технологических возможностей ПР укомплектовывают подъемными, подъемно-поворотными, линейными и крестовыми столами; кантователями; поворотными устройствами; наборами быстросменных захватных устройств и инструмента и др. Средний гарантийный срок службы большинства ПР составляет 5-10 лет при их двухсменной работе.
В мировом парке ПР заметно увеличение доли универсальных ПР. ПР - манипулятор шарнирной конструкции, обеспечивающей доступ руки ПР в любую заданную точку зоны обслуживания; электромеханический привод, имеющий улучшенные динамические и массогабаритные характеристики, позиционно-контурные устройства ЧПУ (УЧПУ), выполненные на базе микроЭВМ. Одним из путей развития ПР является создание роботов модульных конструкций, что позволяет, с одной стороны, увеличить серийность выпуска отдельных узлов и тем самым снизить стоимость ПР, а с другой стороны, оптимизировать число выполняемых ПР функций.
В большинстве современных универсальных и специальных ПР (грузоподъемностью до 60 кг) применяют электромеханический привод, оснащенный микропроцессорным устройством и обеспечивающий повышение КПД, динамических и эксплуатационных характеристик ПР. Около 22 % выпускаемых ПР оснащены электроприводами, а примерно 40 % - гидро- и пневмоприводами. Гидроприводами оснащают, как правило, ПР грузоподъемностью свыше 80 кг.
Появление высокоэффективных электроприводов, широкой номенклатуры датчиков внутренней и внешней информации, микропроцессорных устройств для обработки информации обусловило создание адаптивных ПР, оснащенных широким набором современных технических средств. Применение таких ПР целесообразно на таких операциях, как сборка, сварка, разбор неориентированно расположенных заготовок (особенно в условиях мелкосерийного производства).
По прогнозам специалистов в ПР новых поколений будут реализованы следующие технические решения: встроенное техническое зрение; возможность распознавания прикосновения и силового воздействия; микропроцессорная обработка сигналов сенсорных датчиков; возможность управления сложными пространственными траекториями; мобильность; энергосберегающие приводные механизмы; многофункциональные захваты; возможность речевого общения оператора с ПР; программирование функций безопасности; высокие динамические характеристики; работа в режиме адаптивного обучения.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'