1.1. Напольные ПР с горизонтальной выдвижной рукой и консольно расположенным механизмом подъема
ПР данной группы являются наиболее распространенными как по числу моделей, так и по общему объему выпуска.
Консольно расположенный механизм подъема обеспечивает, как правило, небольшой вертикальный ход, поэтому большинство таких ПР являются специализированными, предназначенными для выполнения простых транспортно-загрузочных операций; отличаются высоким быстродействием; имеют пневматический привод и малую грузоподъемность; оснащены простейшими позиционными УЧПУ.
На рис. 1.1 показана компоновка механической системы ПР с пневмоприводом. На основании 5 установлена сварная рама 4, в нижней части которой размещен механизм 3 поворота руки вокруг вертикальной оси, а в верхней-механизм 2 подъема руки. Поворот вокруг вертикальной оси осуществляется двумя пневмоцилиндрами, соединенными цепной передачей с блоком звездочек, установленных на поворотной колонне. Плавный подход к заданной точке при повороте колонны обеспечивается гидравлическими демпферами 6, в которые упираются концы штоков пневмоцилиндров. Механизм подъема руки состоит из колонны, нижняя часть которой выполнена в виде плунжера, перемещающегося в гидро- или пневмоцилиндре. Рука монтируется на верхнем фланце колонны и представляет собой пневмоцилиндр с выдвижным штоком, на конце которого закрепляется захватное устройство 12. ПР выпускают в одно-, двух- и трехруком исполнении. Положение исполнительных механизмов обычно контролируется жесткими упорами, реже - с помощью путевых выключателей или реле времени.
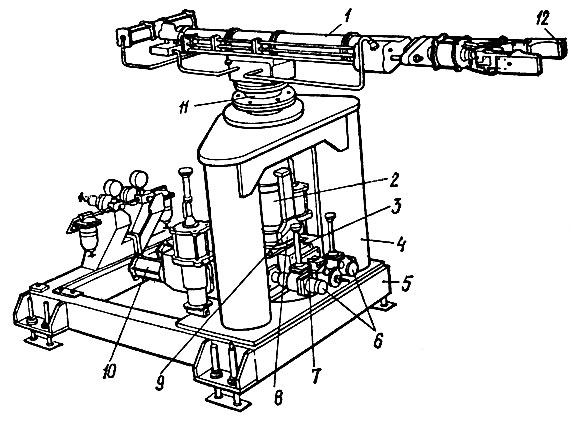
Рис. 1.1. Компоновка механической системы ПР с пневмоприводом: 1 - рука, 2 - механизм подъема, 3 - механизм поворота руки вокруг вертикальной оси, 4 - рама, 5 - основание, 6 - гидравлический демпфер, 7 - устройство остановки, 8 - водило, 9 - рукоятка, 10 - пневмоцилиндр, 11 - колонна, 12 - захватное устройство
Безаварийность работы ПР обеспечивается датчиками внешней информации. ПР данной группы в зависимости от условий работы оснащаются разным числом рук. При этом, поскольку руки действуют одновременно, их число на единицу меньше числа обслуживаемых ПР позиций.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'