1.2. Напольные ПР с выдвижной рукой, установленной на подъемной каретке
В ПР данной группы рука закрепляется на каретке, движущейся по вертикальным направляющим. Как правило, эти ПР работают в цилиндрической системе координат и оснащены гидроприводом с контролем положения по потенциометрическим датчикам. Программа задается штекерной панелью или барабаном, последовательно подключающим требуемые задающие потенциометры, что обеспечивает остановку узлов ПР в нужных положениях. Сигнал с задающего потенциометра сравнивается с сигналом, поступающим от потенциометрического датчика положения звена ПР; система управления вырабатывает сигнал (пропорциональный рассогласованию этих сигналов), который воздействует на золотник соответствующего электрогидравлического следящего привода. Достоинствами такой системы управления являются простота и обеспечение высоких скоростей и плавного торможения при подходе к заданной точке, а недостатком - сравнительно невысокая точность позиционирования.
Установка руки на подъемной каретке, перемещающейся по направляющим, существенно (до 2000 мм) увеличивает вертикальный ход.
В выпускаемых ПР этого типа реализованы все виды приводов рабочих органов и комбинации указанных приводов, а также все известные виды управления. Данные ПР работают в полярной цилиндрической, а также в прямоугольной (плоской и пространственной) системах координат. Грузоподъемность этих ПР 1-1000 кг, число степеней подвижности 3-7.
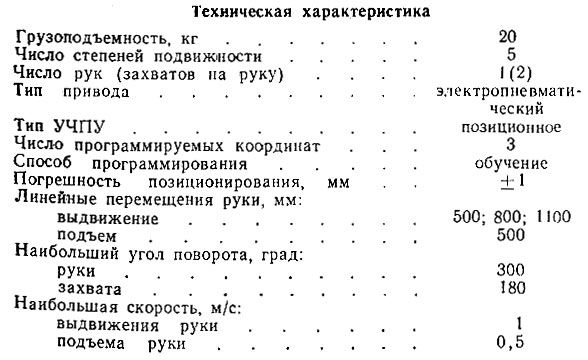
Техническая характеристика, конструктивные параметры, а также типовая компоновка напольных ПР с выдвижной рукой, установленной на подъемной каретке, приведены в табл. 1.2. Все движения ПР реализуются механизмами с гидроприводами.
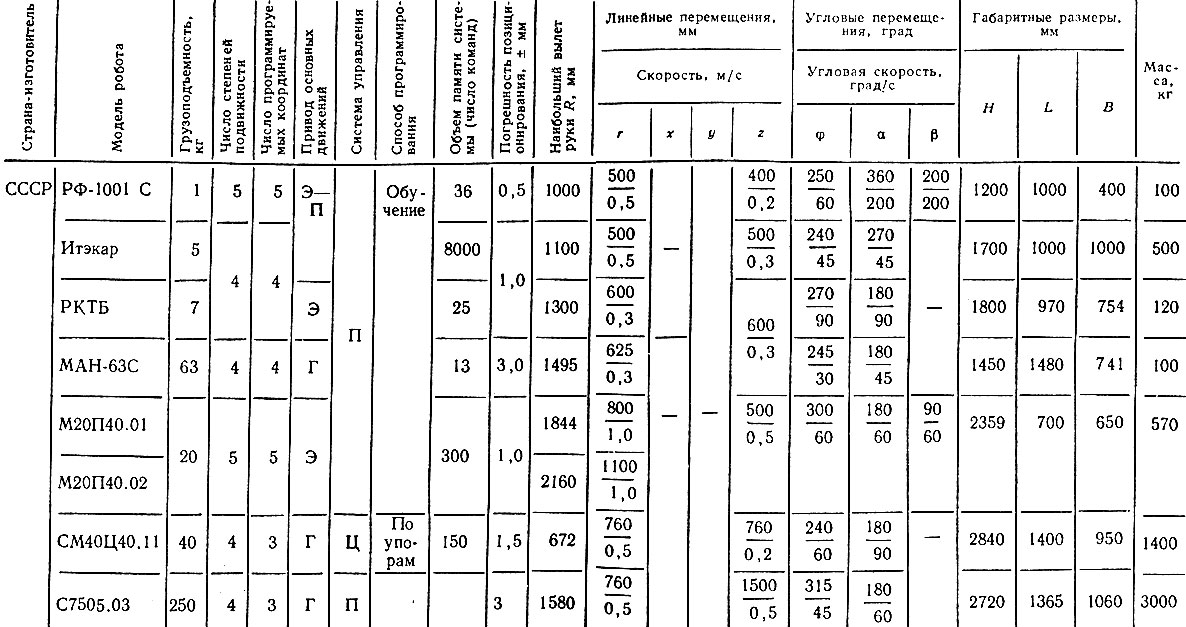
Таблица 1.2. Технические данные напольных промышленных роботов с горизонтальной выдвижной рукой и подъемной кареткой
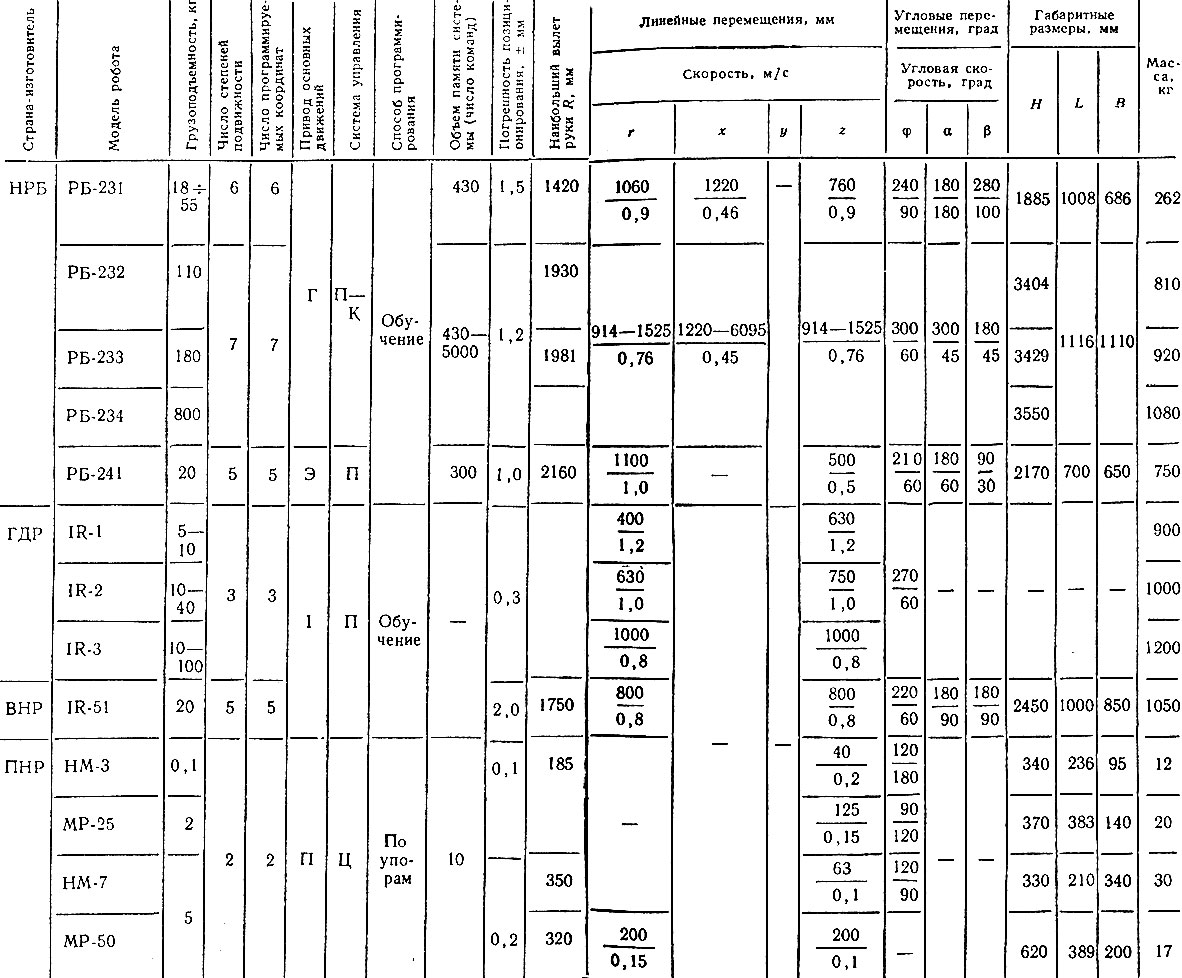
Таблица 1.2. Продолжение
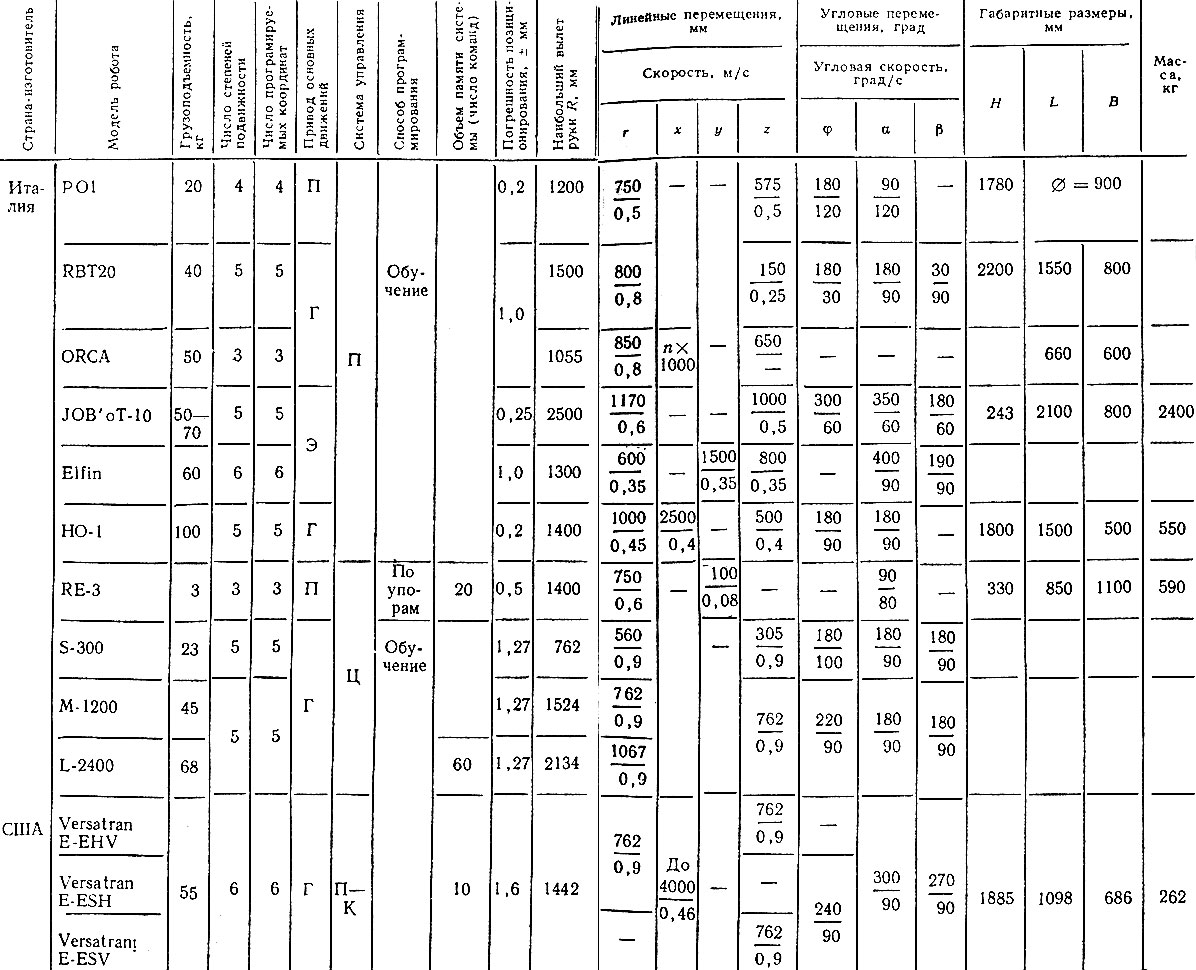
Таблица 1.2. Продолжение
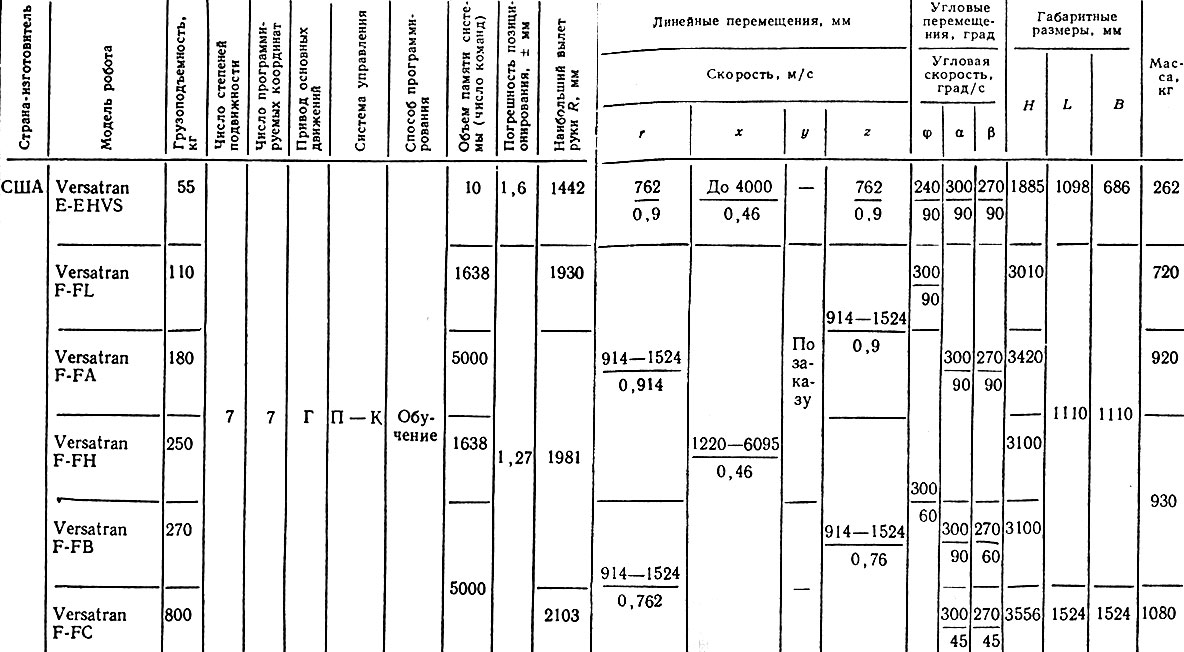
Таблица 1.2. Продолжение
Основные агрегаты гидросистемы расположены на основании ПР, которое при необходимости может быть установлено на тележку, перемещающуюся по напольному или подвесному рельсовому пути. Колонна поворачивается двумя гидроцилиндрами одностороннего действия с помощью цепной передачи.
Каретка с рукой перемещается вертикально двумя гидроцилиндрами, закрепленными на колонне. В руке ПР, представляющей собой трубу, расположены механизмы поворота захватного устройства вокруг взаимно перпендикулярных осей, его сдвига и зажима освобождения. Механические системы, построенные на базе унифицированных узлов, выпускают в нескольких конструктивных исполнениях, различающихся рабочим ходом и грузоподъемностью. ПР каждого исполнения может комплектоваться УЧПУ нескольких типов.
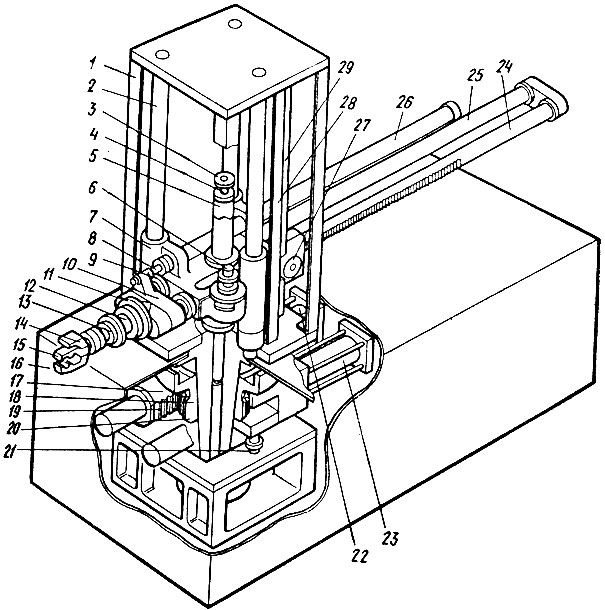
Рис. 1.2. Кинематическая схема ПР мод. POCK MARK-III фирмы 'Kawaguchy' (Япония). 1 - поворотная колонна, 2 - направляющая скалка, 3 - стакан для крепления к каретке штока гидроцилиндра механизма подъема руки, 4 - шток, гидроцилиндра механизма подъема руки, 5 - гидроцилиндр механизма подъема руки, 6 - потенциометр, 7 - каретка, 8 - шток гидроцилиндра продольного перемещения руки, 9 - зубчатое колесо, 10 - скоба, 11 - фланец, 12 - гидроцилиндр механизма поворота захватного устройства, 13 - гидроцилиндр механизма зажима освобождения захватного устройства, 14 - рычажная передача, 15 - захватное устройство, 16 - основание ПР с гидростанцией и аппаратурой, 17 - втулка, 18 - вал-шестерня, 19 - рейка, 20 - зубчатое колесо, 21 - потенциометр, 22, 23, 26 - гидроцилиндры, 24, 25 - скалки руки, 27 - беззазорное колесо, 28 - потенциометр, 29 - измерительная рейка
На рис. 1.2 приведена кинематическая схема ПР мод. POCKS MARK-III (фирмы "Kawaguchy", Япония). Подъем каретки 7 осуществляется от гидроцилиндра 5 по трем направляющим 2, закрепленным внутри колонны 1, установленной на фланце вала-шестерни 18. Гидроцилиндр 5 крепится к колонне, а его шток связан с кареткой 7. На колонне 1 закреплена измерительная рейка 29, находящаяся в зацеплении с беззазорным колесом 27, связанным с валом потенциометра 28. Поворот колонны осуществляется двумя гидроцилиндрами 22 и 23 с помощью реек 19, сцепленных с вертикальным валом-шестерней 18. Обратная связь обеспечивается потенциометром 21, связанным с рейкой 19 через зубчатое колесо 20. Продольное перемещение руки обеспечивается гидроцилиндром 26, закрепленным на каретке 7, шток 8 которого через скобу 10 соединен со скалками 24 и 25, перемещающимися по направляющим качения внутри каретки 7. На скалке 24 нарезана измерительная рейка, соединенная через зубчатое колесо 9 с потенциометром 6. Поворот захватного устройства обеспечивается гидроцилиндром 12.
Зажим - освобождение захватного устройства 15 обеспечивается через рычажную систему 14 гидроцилиндром 13. ПР оснащается позиционным УЧПУ с программоносителем, выполненным в виде штекерной панели.
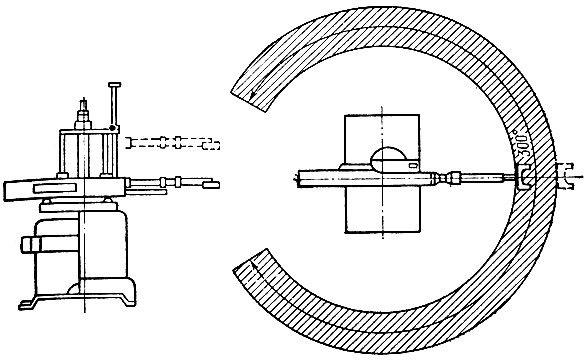
Рис. 1.3. ПР мод. М20П40.01 (СССР)
ПР мод. М20П40.01 (рис. 1.3) (производства СССР) предназначен для обслуживания двух металлорежущих станков с горизонтальной и вертикальной осями шпинделя. Управление ПР производится от позиционного УЧПУ, причем движение по трем степеням подвижности программируются.
Этот ПР может быть оснащен двухместным захватным устройством (грузоподъемность каждого 10 кг) или одноместным захватным устройством (грузоподъемность 10 и 20 кг); может работать со стационарными (неприводными) многопозиционными накопителями; выпускается в трех модификациях, различающихся величиной хода и вылета руки; применяется в условиях крупносерийного и серийного производства.
ПР мод. М20П40.01 предназначен для обслуживания токарных станков моделей 16516Т1, 16К20Ф3, 16К20Т1; 16А16Ц, 16Б05ВФ3; токарно-револьверных станков моделей Г325Ф30 и 1П426Ф3; фрезерных станков моделей 612Ф20 и 6520Ф336; сверлильно-фрезерных станков моделей 21105НФ4 и 2204ВМФ4; шлицефрезерных станков моделей 5350А и 5А352П; круглошлифовальных станков моделей ЗМ151 и ЗМ151В; внутришлифовальных станков мод. СШ-111.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'