1.3. Напольные ПР с выдвижной рукой
ПР данной группы работают в полярной (сферической и цилиндрической) системе координат. ПР, работающие в полярной сферической системе координат, являются универсальными и предназначены для обслуживания различного оборудования, а также для автоматизации операций дуговой и точечной сварки, зачистки заусенцев и др. Для полярной сферической системы координат характерно следующее: линейное перемещение манипулируемого изделия по вертикальной или по одной из горизонтальных осей возможно лишь путем одновременной реализации трех взаимно связанных движений- линейного перемещения руки, ее поворота в вертикальной плоскости и поворота в обратном направлении в той же плоскости головки с закрепленным на ней захватным устройством. Поэтому ПР, работающие в полярной сферической системе координат, обычно имеет пять и более степеней подвижности, одна из которых обеспечивает программируемое угловое перемещение головки с захватным устройством.
ПР "Unimate" фирмы "Unimation Inc." (США) является типичным представителем указанной группы ПР. Выпускается свыше. 10 базовых моделей таких ПР (в стационарном и передвижном исполнениях), специализированных для выполнения различных основных и вспомогательных операций. Установка ПР возможна под любым углом к горизонтали.
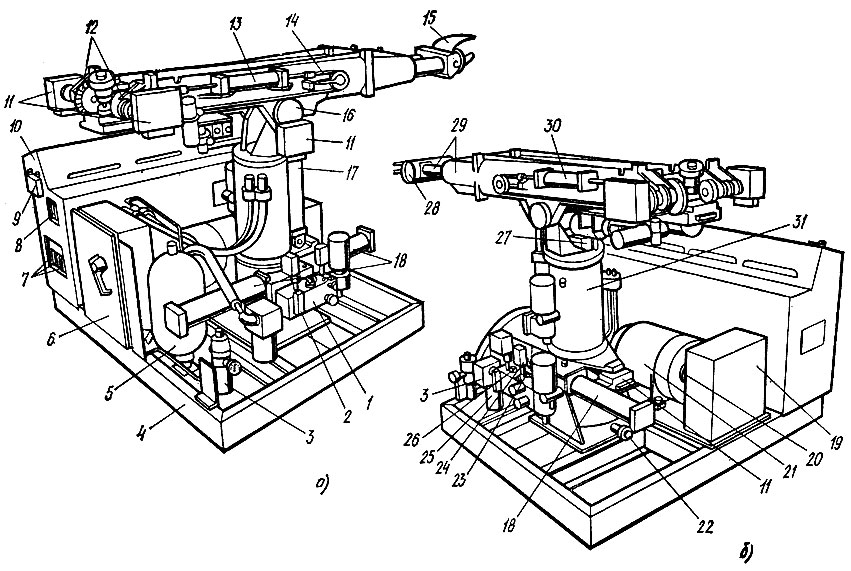
Рис. 1.4. Конструкция ПР Unimate мод. MARK-II фирмы 'Unimation Inc.' (США): а - вид справа; б - вид слева; 1 - главный коллектор, 2 - клапан разгрузки насоса, 3 - фильтр воздушный, 4 - основание, 5 - гидравлический аккумулятор, 6 - шкаф силового электрооборудования, 7 - электрические предохранители, 8 - разъем пульта ручного управления, 9 - устройство блокировки системы программного управления, 10 - УЧПУ, 11 - кодовый датчик, 12 - конические зубчатые колеса, 13 - гидравлический цилиндр ротации захватного устройства, 14 - цепная передача, 15 - захватное устройство, 16 - привод кодового датчика качания руки в вертикальной плоскости, 17 - гидравлический цилиндр качания руки, 18 - гидроцилиндры поворота руки, 19 - воздушно-масляный радиатор, 20 - вентилятор, 21 - электродвигатель привода гидравлического насоса, 22 - фильтр, 23 - реле давления, 24 - датчик давления в гидросистеме, 25 - фильтр гидравлический, 26 - разгрузочный клапан, 27 - поворотный гидравлический коллектор, 28 - поворотная головка захвата, 29 - рука, 30 - гидроцилиндр привода сгибания захвата, 31 - поворотная колонна
На рис. 1.4 показана конструктивная схема ПР "Unimate" мод. Mark-II, УЧПУ 10 которого крепят к основанию 4 или устанавливают отдельно. На основании 4 смонтированы гидростанция и механизм поворота руки вокруг вертикальной оси. В верхней части поворотной колонны 31 на шарнирных опорах установлена выдвижная рука, которая под действием гидроцилиндра 17 способна совершать качательные движения в вертикальной плоскости. Направляющие руки выполнены в виде пары трубчатых скалок, внутри которых проходят передаточные валы, соединенные с механизмом вращения поворотной головки 28 захвата, к которой крепится захватное устройство 15 с приводом от пневмоцилиндра. Все приводы оснащены кодовыми датчиками положения.
ПР "Unimate" в зависимости от назначения могут оснащаться позиционными, контурными и позиционно-контурными УЧПУ.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'