1.4. Напольные ПР с многозвенной рукой
ПР этой группы, получившие в настоящее время большое распространение, являются в основном универсальными и предназначены для выполнения транспортно-разгрузочных и технологических операций.
Основные достоинства многозвенной руки - компактность и расширенная зона обслуживания при малых габаритах механизмов ПР. Однако при этом усложняются механическая система и УЧПУ. Как правило, такие ПР работают в ангулярной (угловой) системе координат. В то же время созданы упрощенные конструкции ПР, в которых применены многозвенные руки со спрямитель-ными механизмами. В качестве последних используются цепные или рычажно-зубчатые передачи, связывающие шарнирные звенья руки и обеспечивающие принудительный поворот ведомого звена при повороте ведущего; при этом конец ведомого звена с закрепленным на нем захватным устройством движется прямолинейно.
Компоновка и кинематическая схема напольного ПР мод. Asea IRB-6 (фирмы "Asea", Швеция) с многозвенной рукой (грузоподъемностью 6 кг) показаны на рис. 1.5.
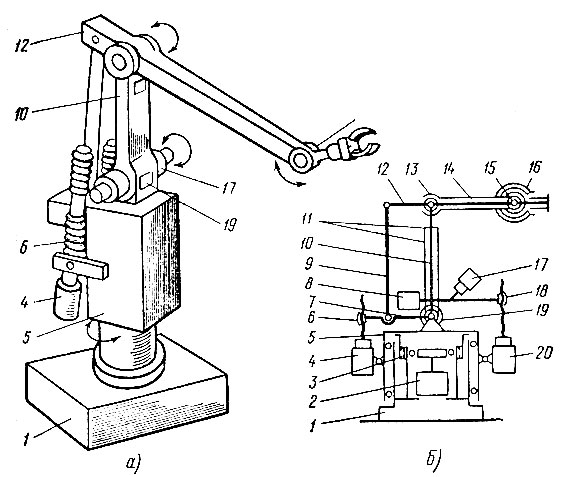
Рис. 1.5. Компоновка (а) и кинематическая схема (б) ПР мод. Asea IRb-6 фирмы 'Asea' (Швеция): 1 - основание, 2, 4, 17, 20 - электродвигатели с печатным якорем и встроенным редуктором, 3 - волновая передача, 5 - поворотный корпус, 6, 18 - шариковые винтовые пары, 7 - тяга, 8 - уравновешивающий груз, 9, 10, 12 - звенья руки, 11, 14 - тяги, 13, 15, 19 - кривошипы, 16 - коническая передача
ПР оснащен электродвигателями 2, 4, 17 и 20 с печатным якорем и встроенным редуктором. Поворот руки вокруг вертикальной оси осуществляется от электродвигателя 2 через волновую беззазорную передачу 3, выходное колесо которой связано с поворотным корпусом 5. Электродвигатель 2 через шариковую винтовую пару 6 поворачивает тягу 7, образующую со звеньями 9, 10 и 12 шарнирный параллелограмм, обеспечивающий поворот звена 12 вокруг оси 13. Наклон звена 10 обеспечивается электродвигателем 20, движение от которого через шариковую винтовую пару 18 передается на кривошип 19. При необходимости путем автоматического пересчета в УЧПУ скоростей можно осуществлять поступательные перемещения захватного устройства (при одновременной работе электродвигателей 4 и 20). Для разгрузки приводов предусмотрен уравновешивающий груз 8.
Внутри звеньев руки размещены тяги 11, 14 и кривошипы 13, 15 и 19, образующие систему передач, которые обеспечивают поворот захватного устройства.
ПР оснащен позиционным УЧПУ и датчиками положения, контролирующими движения звеньев ПР по всем степеням подвижности.
ПР мод. Asea IRB-6 предназначен для обслуживания металлорежущих станков, сварки, окраски, абразивной очистки, загрузки прессов. Предусмотрена возможность дистанционного управления ПР с удалением УЧПУ на 15-20 м от механической системы робота; программирование осуществляется методом обучения (с переносного пульта).
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'