1.5. Подвесные ПР
Преимуществом подвесных ПР тельферного типа является то, что они занимают мало производственной площади и позволяют оптимизировать обслуживание оборудования. Так, при использовании монорельса (установленного на опоры) большой длины можно одним ПР обслуживать группу станков, расположенных вдоль этого монорельса.
Роботы данной группы условно подразделяются на ПР упрощенной конструкции (работающие в плоской прямоугольной системе координат и используемые для транспортных работ, а также для обслуживания однотипного оборудования в составе автоматических линий) и ПР сложной конструкции с многозвенной рукой (работающие в ангулярной системе координат, обладающие вследствие этого большими манипуляционными возможностями и оснащенными УЧПУ с элементами адаптивного управления. Техническая характеристика подвесных ПР тельферного типа приведена в табл. 1.3.
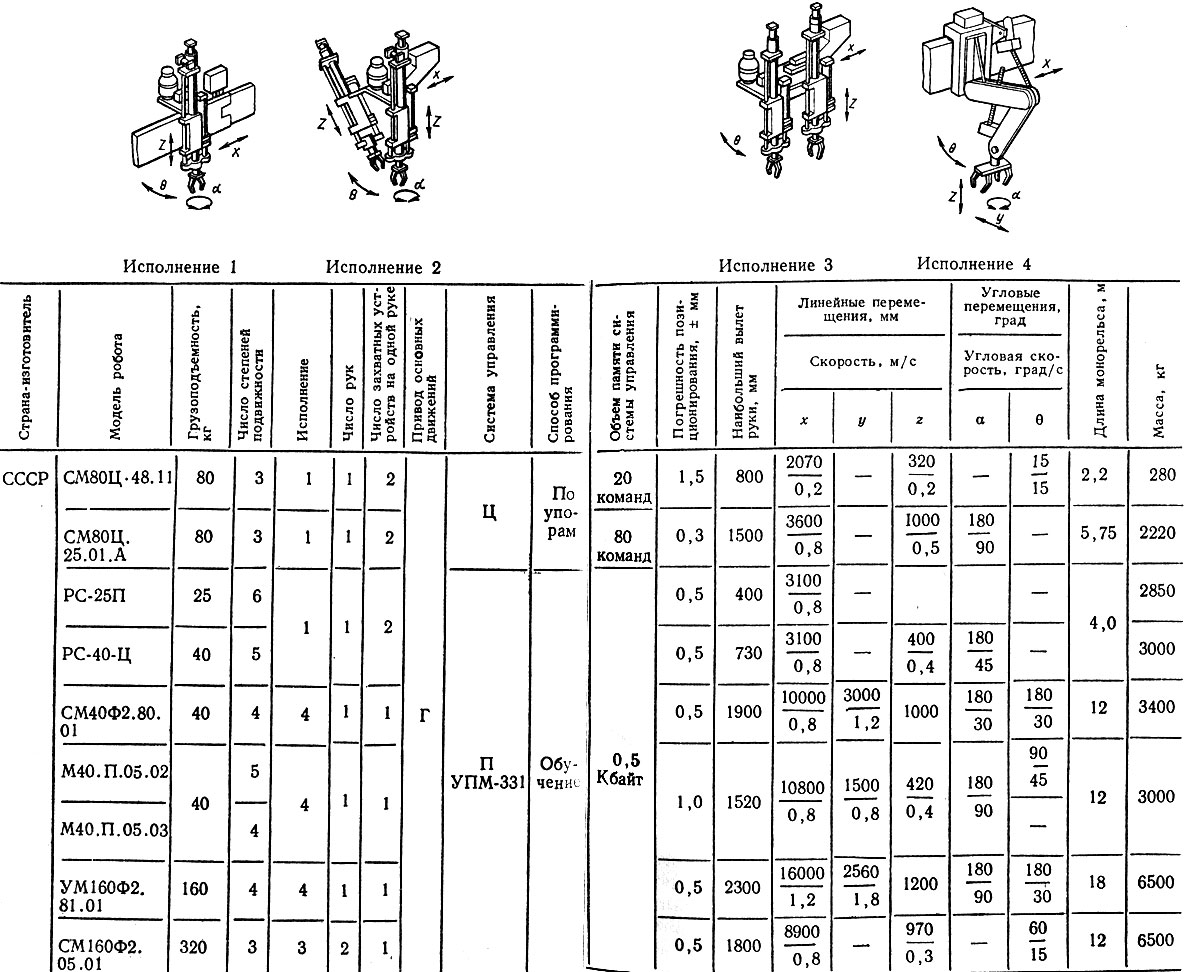
Таблица 1.3. Техническая характеристика подвесных ПР тельферного типа
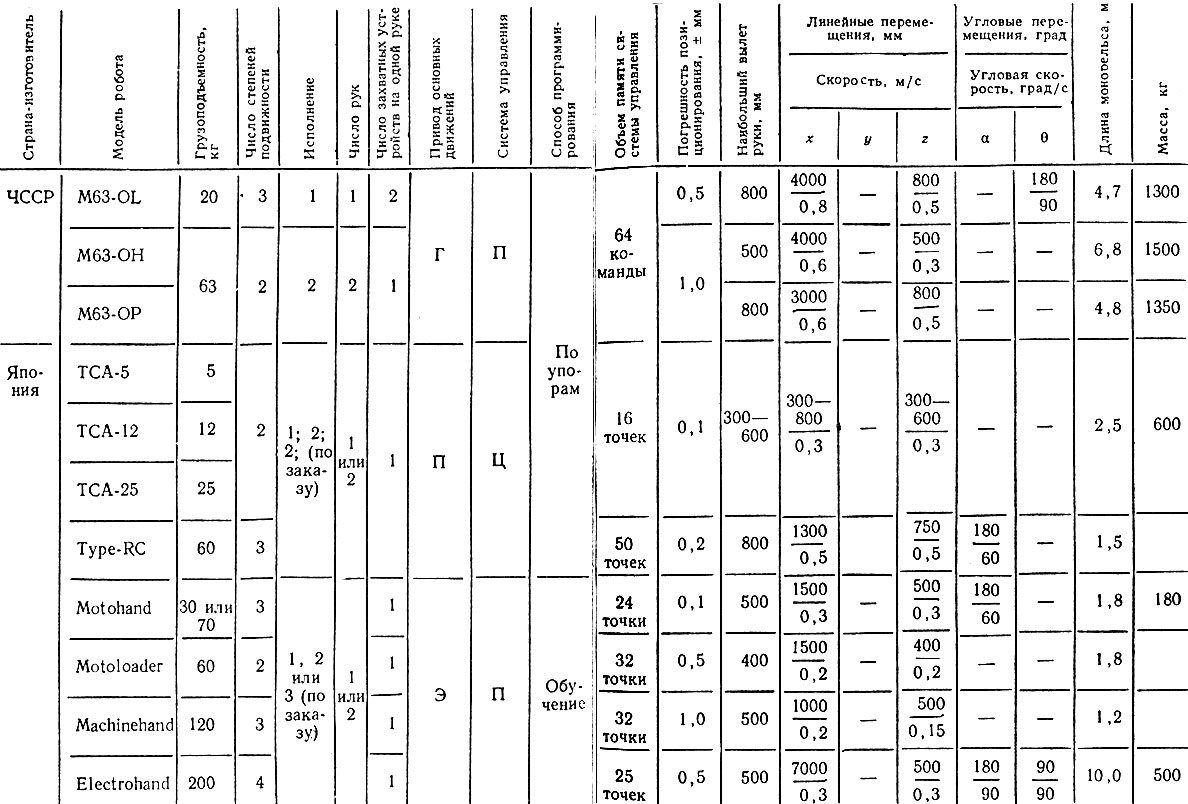
Таблица 1.3. Продолжение
ПР мод. СМ80Ц.25.01 (производства СССР) предназначен для обслуживания патронных токарных станков (один ПР обслуживает один станок). Каретка ПР с закрепленной на ней выдвижной рукой перемещается по монорельсу в плоскости, проходящей через ось вращения шпинделя станка. Заготовки типа фланцев помещают в специальную кассету, расположенную за передней бабкой станка. Для вывода очередного ряда заготовок на линию, лежащую в плоскости работы руки, предусмотрен тактовый стол, перемещающийся в поперечном направлении. Для ускорения операции загрузки применен двухпозиционный захват, который может поворачиваться на 180° вокруг оси руки. ПР оснащен гидроприводом и цикловой системой программного управления, обеспечивающей отработку нескольких стандартных циклов. Положение механизмов определяется упорами, смонтированными в барабане.
ПР имеет элементы адаптивного управления: когда рука должна взять заготовку из магазина, она движется на малой скорости до соприкосновения с поверхностью заготовки; момент касания контролируется датчиком, подающим команду на зажим; если в данном гнезде кассеты нет заготовки, то после полного выдвижения руки на запрограммированное расстояние подается команда на перемещение руки к следующему гнезду.
Применение двухпозиционных захватных устройств или двух независимых рук позволяет значительно сократить несовмещенное время работы станка и ПР, что особенно важно для ПР тельферного типа, зоны обслуживания которых отличаются большими расстояниями между позициями хранения (выдачи) и обработки деталей.
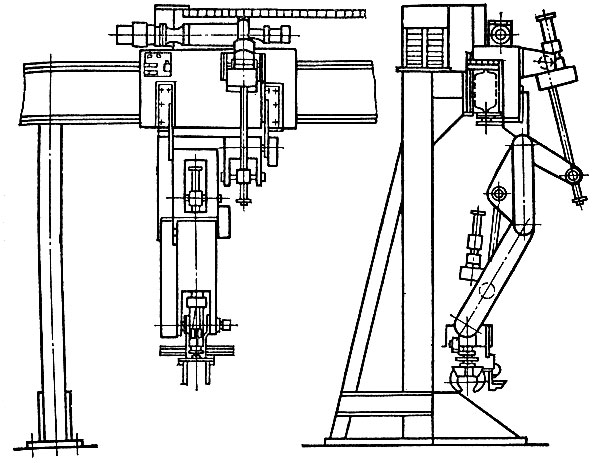
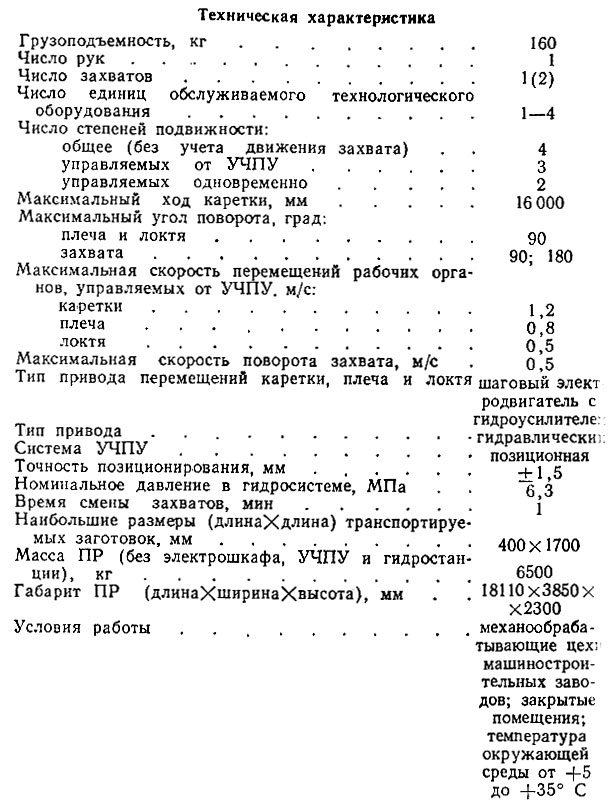
Рис. 1.6. ПР мод. УМ160Ф2.81.01 (производства СССР)
ПР мод. УМ160Ф2.81.01 (рис. 1.6) (производства СССР), предназначенный для выполнения вспомогательных операций (в основном загрузочных и транспортных), используется для обслуживания робототехнических технологических комплексов (РТК). Значительные размеры (16 000×20 000 мм) рабочей зоны позволяют применять его для группового обслуживания оборудования. Преимущественная область применения ПР - загрузка деталей типа тел вращения на станки с. горизонтальной осью вращения шпинделя. Однако при оснащении соответствующими захватными устройствами ПР можно использовать и для манипулирования плоскими, коробчатыми деталями и деталями сложной формы. Грузоподъемность ПР составляет 160 кг (при массе захватного устройства с держателем, равной 50 кг). ПР комплектуется широкодиапазонными быстросменными захватными устройствами с автоматической сменой захватов. Захватные устройства оснащены встроенными датчиками контроля Правильности базирования детали на станке, а также датчиком, определяющим положение деталей, находящихся в позициях транспортной системы. Имеется устройство светозащиты, обеспечивающее безопасность эксплуатации оборудования РТК.
В состав ПР входят: каретка с установленной на ней рукой, перемещающаяся по монорельсу; приводы движений руки; механизм поворота и зажима захватного устройства; гидростанция; УЧПУ типа УПМ331.
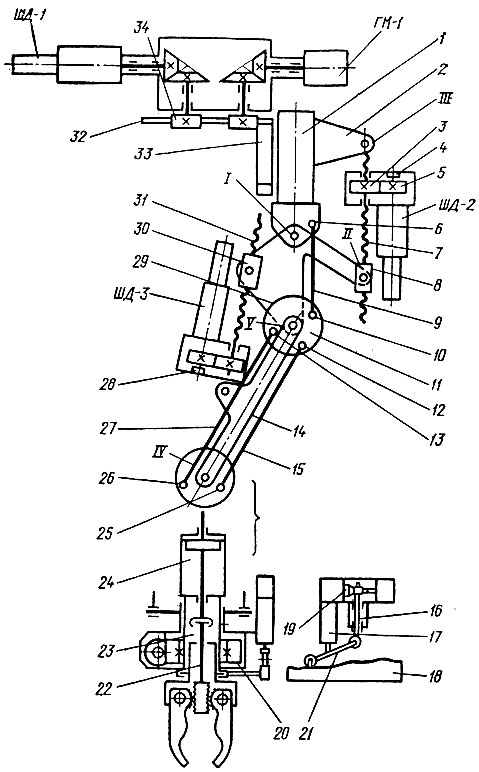
Рис. 1.7. Кинематическая схема ПР мод. УМ160Ф2.81.01
Кинематическая схема ПР представлена на рис. 1.7. Каретка 1 ПР перемещается по монорельсу 33, установленному на опорах. Ее привод осуществляется от шагового электродвигателя ШД-1 через гидроусилитель. Движение через конические зубчатые колеса передается к зубчатому колесу 34, которое зацепляется с рейкой 32. Привод содержит дополнительную соединенную с гидродвигателем ГМ-1. передачу, которая служит для выборки зазора в реечном зацеплении.
На каретке шарнирно закреплено плечо 29 руки. С плечом жестко связан рычаг, несущий шарнирно закрепленную шариковую гайку 8. К каретке на кронштейне 2 шарнирно крепится привод плеча, включающий в себя шариковый винт 7, зацепляющийся с гайкой 8. Привод осуществляется шаговым электродвигателем ШД-2 через гидроусилитель и пару цилиндрических колес 3 и 5. С колесом 3 связана кулачковая тормозная муфта 4 с гидравлическим приводом, запирающая винт 7 при падении давления в гидросистеме.
При вращении винта 7 гайка перемещается по нему, поворачивая плечо 29 (максимальный угол поворота 90°). На плече руки на оси V шарнирно крепится рычаг 14, на котором шарнирно закреплен привод, аналогичный приводу плеча. Шариковый винт 31 привода зацепляется с гайкой 30, которая шарнирно закреплена на рычаге. Вращение винту 31 передается от шагового электродвигателя ШД-3 через пару цилиндрических колес. С одним колесом связана кулачковая тормозная муфта 28. При вращении винта 31 рычаг 14 руки поворачивается (максимальный угол поворота 90°), В исходном положении локоть устанавливается относительно руки под углом 30°, что позволяет улучшить форму рабочей зоны.
К концу рычага 14 шарнирно крепится головка 15 несущая шпиндель 23, в котором закрепляются сменные захватные устройства. Шпиндель поворачивается вокруг оси на 180° и имеет промежуточную точку остановки в середине хода.
К руке крепится спрямительный механизм, состоящий из системы рычагов и служащий для обеспечения поступательного перемещения головки, т. е. для сохранения вертикального положения шпинделя при любом положении звеньев руки. Этот механизм включает в себя палец 6, жестко закрепленный на каретке, свободный Диск 11, несущий пальцы 10, 12 и 13, а также диск, жестко соединенный с цапфой головки. На диске закреплены пальцы 26 и 25. Пальцы 6 и 10 соединены рычагом 9, пальцы 12 и 25 - рычагом 15, пальцы 13 и 26 - рычагом 27. Вместе со звеньями руки рычаги составляют Шарнирные параллелограммы.
Поворот шпинделя головки осуществляется лопастным гидроцилиндром 20, управляемым следящим золотником 17. Щуп следящего золотника контактирует через рычаг 21 с кольцевым копиром 18, закрепленным на шпинделе головки. Ось рычага 21 закреплена на тяге 16, которая опирается на ступенчатый шток 19 вспомогательного трехпозиционного гидроцилиндра. В зависимости от положения штока ось рычага может устанавливаться на один из трех уровней, что приводит к изменению положения щупа следящего золотника по отношению к копиру и, как следствие, к повороту цилиндра. Каждому уровню рычага соответствует определенная точка остановки шпинделя. Шпиндель поворачивается на угол 180° и имеет промежуточную точку остановки в середине хода. Губки захватного устройства перемещаются с помощью встроенного в головку гидроцилиндра 24 через тягу 22.
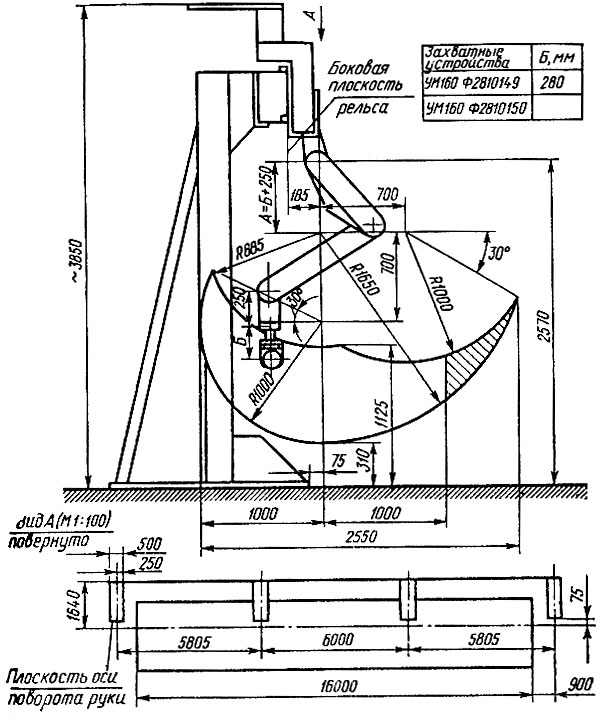
Рис. 1.8. Размеры и форма рабочей зоны ПР мод. УМ160Ф2.81.01
Размеры и форма рабочей зоны ПР приведены на рис. 1.8. В заштрихованной части рабочей зоны ПР работает с пониженной (до 80 кг) грузоподъемностью.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'