2.1. Классификация ЗУ
Разнообразие ЗУ, пригодных для решения сходных задач, большое число признаков, характеризующих их различные конструктивно-технологические особенности, не позволяют построить классификацию ЗУ по иерархическому принципу. Примеры отдельных классификационных групп ЗУ приведены в табл. 2.1.
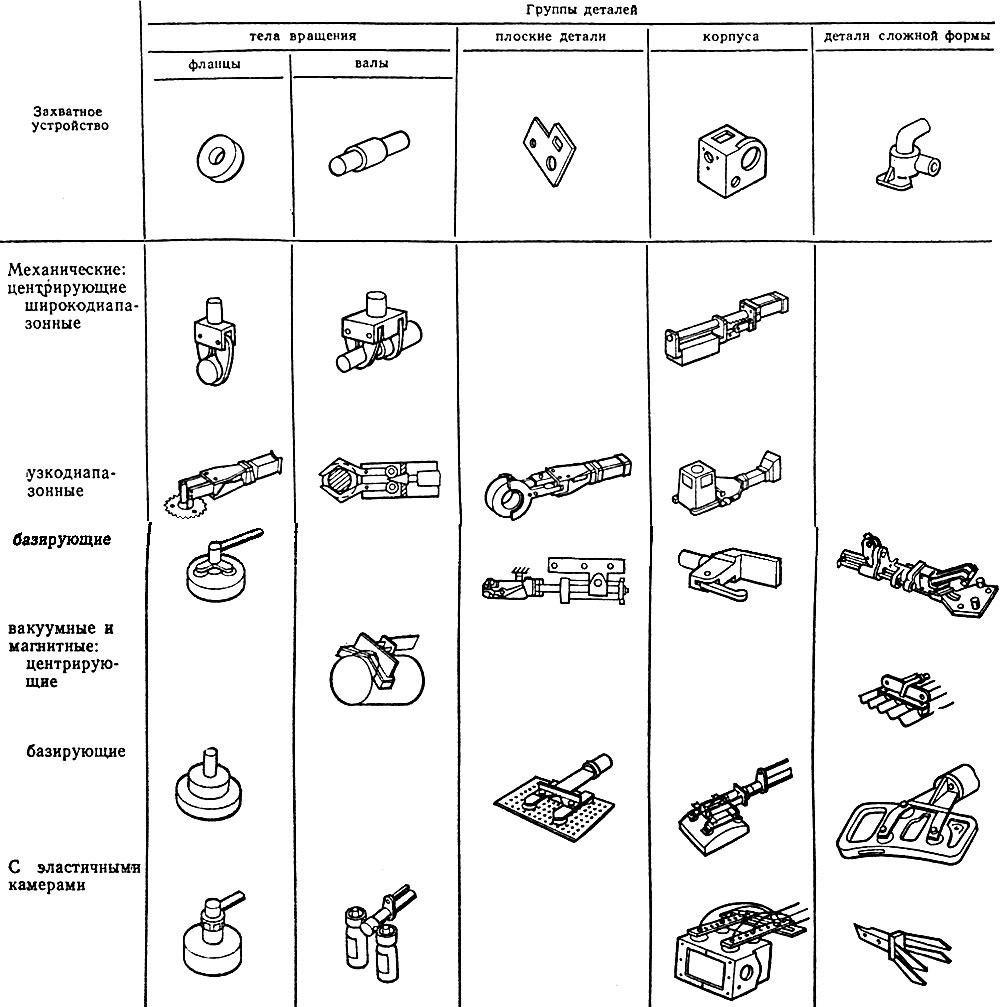
Таблица 2.1. Классификационные группы ЗУ
По принципу действия ЗУ можно разделить на три группы.
- Зажимные ЗУ воздействуют на объект с помощью рабочих элементов (губок, пальцев, клещей и т. п.) и удерживают его в результате действия сил трения, возникающих при зажиме, или совместного действия сил трения и запирающих усилий. Зажимные ЗУ (все они являются устройствами активного типа) подразделяются на механические (клещи, тиски, шарнирные пальцы) и с эластичными рабочими элементами (камерами, деформирующимися под действием нагнетаемого внутрь сжатого воздуха или жидкости).
- Поддерживающие ЗУ (крюки, петли, вилки и захваты, не зажимающие заготовку) используют для Удержания объекта за его нижнюю поверхность, его выкупающие части или имеющиеся в объекте отверстия.
- Притяжные ЗУ оказывают на объект силовое воздействие, создаваемое, как правило, с помощью магнитного поля и вакуума, и, реже, с помощью электростатического эффекта, адгезии, липких накладок и т. п.
По характеру базирования объекта ЗУ делятся на пять групп.
- ЗУ, способные перебазировать объект, могут изменять положение удерживаемой детали благодаря управляемым действиям рабочих элементов.
- Центрирующие ЗУ определяют положение оси или плоскости симметрии захватываемого объекта. Это прежде всего механические ЗУ, оснащенные кинематически связанными рабочими элементами, имеющие губки в виде призм и т. п.
- Базирующие ЗУ определяют положение базовой поверхности (или базовых поверхностей), что характерно для поддерживающих ЗУ, а в ряде случаев и для зажимных ЗУ.
- Фиксирующие ЗУ сохраняют положение объекта, которое тот имел в момент захватывания.
- ЗУ, не обеспечивающие базирования или фиксации объекта, для оснащения ПР применяются крайне редко.
По виду управления ЗУ подразделяются на четыре группы.
- Неуправляемые ЗУ: к ним относятся устройства с постоянными магнитами, с вакуумными присосками без принудительного разряжения и др.; для снятия объекта с таких ЗУ требуется усилие, превышающее усилие, необходимое для удержания объекта.
- Командные ЗУ: они управляются только командами на захватывание или освобождение объекта; к таким ЗУ, в частности, относятся устройства с пружинным приводом и стопорными механизмами, срабатывающими через такт, раскрытие или закрытие губок происходит при взаимодействии ЗУ с объектом манипулирования или элементами оборудования.
- Жестко программируемые ЗУ, управляемые от УЧПУ: величина раскрытия или закрытия губок, взаимное расположение рабочих элементов и усилие зажима в таких ЗУ меняются в зависимости от заданной программы.
- Адаптивно управляемые ЗУ - программируемые устройства, оснащенные различными датчиками внешней информации, определяющими форму поверхности и массу объекта, усилие зажима, проскальзывание объекта относительно рабочих элементов ЗУ т. п.
По характеру крепления к руке ПР все ЗУ можно разделить на четыре группы.
- Несменяемые ЗУ, являющиеся неотъемлемой частью конструкции ПР. Замена таких ЗУ не предусматривается.
- Сменные ЗУ - самостоятельные узлы с базовыми поверхностями для крепления к ПР, не рассчитанные на быструю замену (например, ЗУ, установленные на фланце руки с помощью нескольких винтов).
- Быстросменные ЗУ - сменные узлы, конструкция базовых поверхностей которых обеспечивает их строе крепление и освобождение (например, ЗУ с байонетным замком).
- ЗУ, пригодные для автоматической смены,- устройства, конструкция базовых поверх-остей которых обеспечивает возможность их автоматического крепления и освобождения.
|
ПОИСК:
|
© ROBOTICSLIB.RU, 2001-2019
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'