2.2. Конструкция ЗУ
Механические ЗУ являются наиболее распространенными и многообразными по конструктивному исполнению.
Неуправляемые механические ЗУ выполняются в виде пинцетов, разрезных упругих валиков (рис. 2.1, а), цанговых втулок (рис. 2.1, б) или клещей с одной (рис. 2.1, в) и двумя (рис. 2.1, г) подвижными губками, находящимися под действием пружин. Разжим рабочих элементов 2 ЗУ происходит при контакте с заготовкой 1, что может вызвать повреждение Детали или зажимных элементов. Деталь удерживается под упругим воздействием зажимных элементов, ее освобождение - принудительное (путем применения дополнительных устройств). Такие ЗУ используют в условиях массового производства при манипулировании объектами небольших массы и размеров.
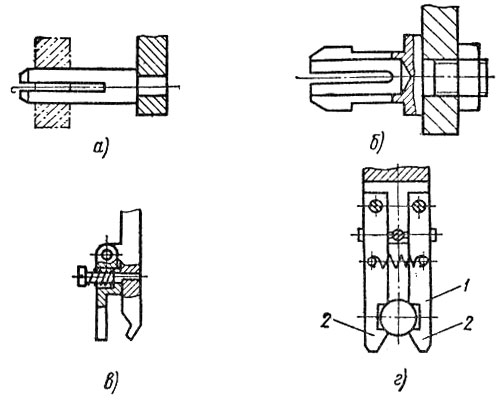
Рис. 2.1. Неуправляемые механические ЗУ в виде: а - пинцетов, валиков, б - цанговых втулок, в - клещей, г - двух подвижных губок; 1 - заготовка, 2 - рабочие элементы ЗУ
Неприводные механические ЗУ со стопорными механизмами обеспечивают чередование циклов зажима и освобождения деталей, являются автономными, не требуют специальных команд от системы управления и дополнительного подвода энергии. Деталь удерживается силой пружин путем самозатягивания или запирания губок. Как правило, подобные ЗУ работают только в вертикальном положении.
На рис. 2.2, а представлено ЗУ для удержания валов или фланцев по их наружному диаметру. На корпусе 7 устройства закреплена направляющая 5, несущая запирающую планку 4. По направляющей может скользить головка 3, в которой шарнирно закреплены губки 1. Когда деталь удерживается губками захватного устройства, планка 4 входит между верхними концами губок 1, препятствуя их раскрытию. При укладке детали на разгрузочную позицию технологического агрегата захватное устройство перемещается вниз до контакта детали с поверхностью, на которую производят установку. При этом головка 3 с помощью упора 2 упирается в деталь и останавливается, а корпус 7 продолжает опускаться. Планка 4 опускается и высвобождает губки 1, которые расходятся под действием пружины 13. Одновременно срабатывает стопорное устройство, состоящее из свободно вращающейся защелки 11, помещенной на оси 12, нижней втулки 9, закрепленной в корпусе 7, и верхней втулки 8. Последняя имеет храповые выступы только снизу, а втулка 9 имеет зубцы 6 сверху и снизу и, кроме того, снабжена прорезью по форме защелки 11, у которой по сторонам имеются треугольные выступы, смещенные относительно храповых зубцов. При сближении корпуса 7 и головки 3 защелка входит в зацепление с верхними храповыми зубьями и Поворачивается на угол 45°. Когда корпус и головка Расходятся, защелка входит в зацепление с верхними храповыми зубьями втулки 9, поворачивается еще на ври ее выступы 10 попадают в прорезь. При этом запирающая планка 4 перемещается между верхними концами губок 1, обеспечивая зажим детали.
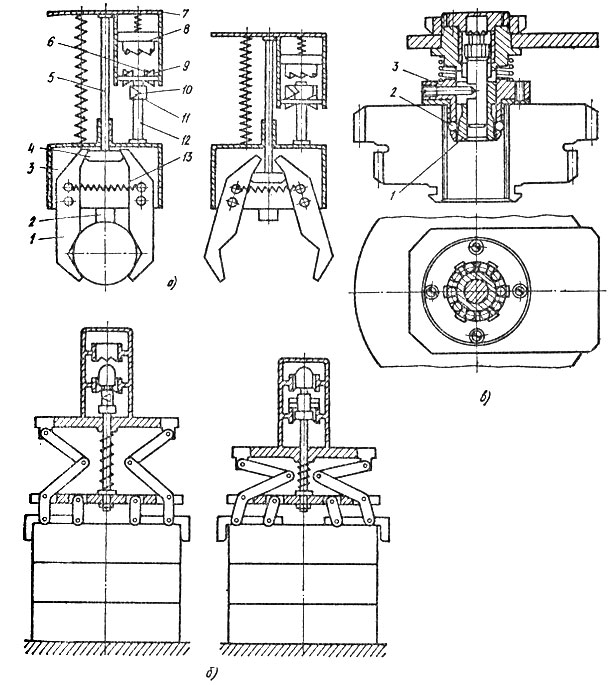
Рис. 2.2. Неприводные механические ЗУ со стопорными механизмами: а - для удержания валов или фланцев по их наружному диаметру, б - взятия из стопы деталей типа фланцев, в - для удержания деталей по внутреннему диаметру отверстия
Для того чтобы разомкнуть систему, необходимо произвести еще одно сближение корпуса и головки. В результате защелка опять войдет в зацепление с храповыми зубцами верхней втулки и повернется на 45°, а когда корпус 7 и головка 3 станут расходиться, защелка 11 войдет в зацепление с храповыми зубцами верхней втулки 8, повернется еще на 45° и будет удержана втулкой 8. Губки захватного устройства при этом окажутся раскрытыми.
На рис. 2.2, б представлено тактовое пружинное ЗУ, обеспечивающее взятие из стопы деталей типа фланцев, зубчатых колес и втулок.
На рис. 2.2, в показано узкодиапазонное ЗУ для удержания деталей по внутреннему диаметру отверстия. Захватная часть состоит из конуса 1 и шариков 2, расположенных по окружности в обойме 3. Угол конуса (5-6°) должен быть меньше угла трения между шариками и деталью.
Среди командных ЗУ наиболее распространены ЗУ клещевого типа с рычажными передаточными механизмами, обеспечивающими значительное усилие зажима. Движение губок обеспечивается пневматическим, гидравлическим или электромеханическим приводом. Достоинства пневмопривода - простота, удобство подвода энергии (один шланг), отсутствие утечек, легкость регулирования усилия зажима, возможность использования в агрессивных средах и в зонах высоких температур; недостаток - большой габарит при сравнительно малых усилиях зажима. Гидропривод обеспечивает значительные усилия зажима при малом габарите, что в сочетании со способностью к регулированию предопределило его широкое применение. Электропривод ввиду сравнительной сложности имеет пока ограниченное применение.
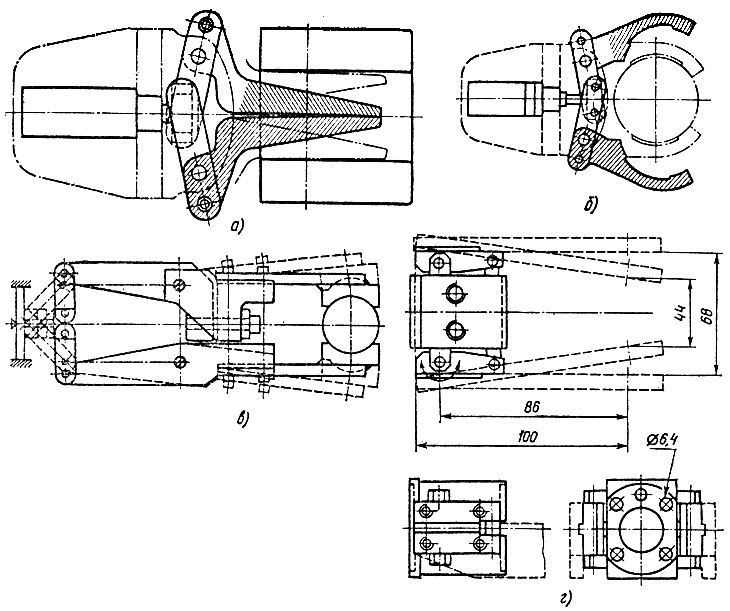
Рис. 2.3. Клещевые ЗУ с рычажными передаточными механизмами
На рис. 2.3 показаны клещевые ЗУ с гидравлическим приводом. В ЗУ, показанных на рис. 2.3, а и б, гидроцилиндр расположен между шарнирно закрепленными планками, связанными с рычажным механизмом. Зажимные губки выполнены сменными и крепятся к этим планкам. Путем смены губок обеспечивается захват детали за внутреннюю или наружную поверхность. В ЗУ показанном на рис. 2.3, в, одна из губок установлена на качающейся планке, угловое положение которой относительно рычага может регулироваться винтом, что позволяет изменять взаимное расположение губок. На рис. 2.3, г приведено ЗУ, в котором для удержания детали используется усилие упругой деформации пальцев.
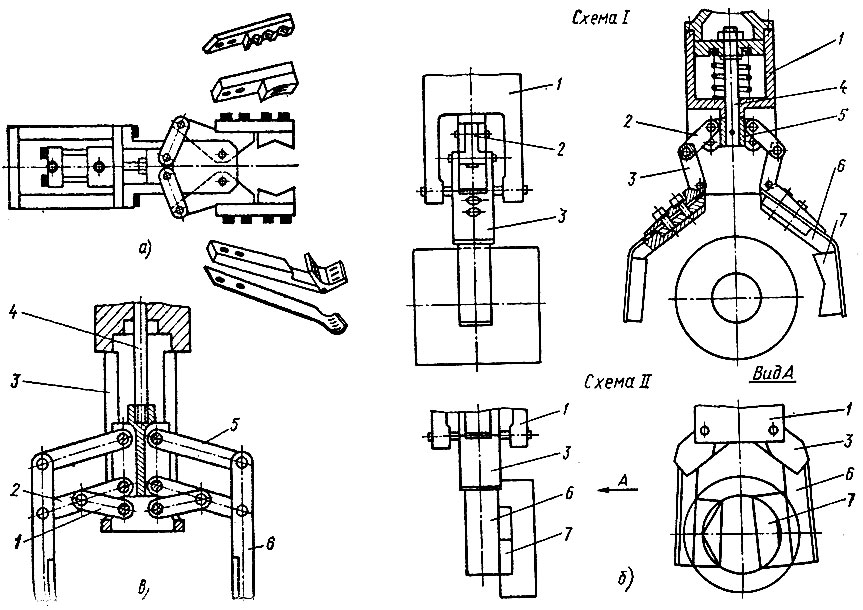
Рис. 2.4. Широкодиапазонные пневматические рычажные ЗУ
На рис. 2.4, а приведена схема широкодиапазонного пневматического рычажного ЗУ со сменными рабочими Дубками, что позволяет использовать его для работы с объектами различной формы. Аналогичное ЗУ для фланцев и колец показано на рис. 2.4,6. На штоке 4 пневмоцилиндра 1 установлена планка 5, на которой шарнирно закреплены тяги 2, связанные с поворотными рычагами 3. К рычагам крепятся держатели 6, несущие сменные губки 7. Переналадка на другой диапазон захватываемых поверхностей осуществляется следующими способами: перестановкой осей тяг 2 в дополнительные отверстия планки 5; сдвигом держателей 6 по рычагам 3; сменой держателей или губок. На схеме 1 (см. рис. 2.4,6) показана наладка ЗУ для удержания Летали за наружную поверхность, а на схеме 11 (см. рис. 2.4, б) - за внутреннюю поверхность.
На рис. 2.4, в представлено центрирующее широкодиапазонное ЗУ с параллельным перемещением губок. К корпусу 3 шарнирно крепятся рычаги 1. В направляющих корпуса перемещается тяга 4, связанная с приводом, на котором закреплены оси рычагов 2 и 5. К средним точкам рычагов 2 присоединены концы рычагов 1. Длина рычагов 2 вдвое больше длины рычагов 1, и шарнирные треугольники, образованные этими рычагами, являются равнобедренными, чем и обеспечивается прямолинейность перемещения губок 6, которые составляют вместе с тягой 14 и рычагами 2 и 5 шарнирные параллелограммы.
В конструкциях механических захватных устройств широкое применение нашли реечные передачи, по сравнению с рычажными они имеют меньший габарит, обеспечивают большее раскрытие губок, однако создают меньшее усилие зажима объекта. На рис. 2.5 представлены примеры конструкций широкодиапазонных центрирующих ЗУ с реечными передаточными механизмами для деталей типа тел вращения.
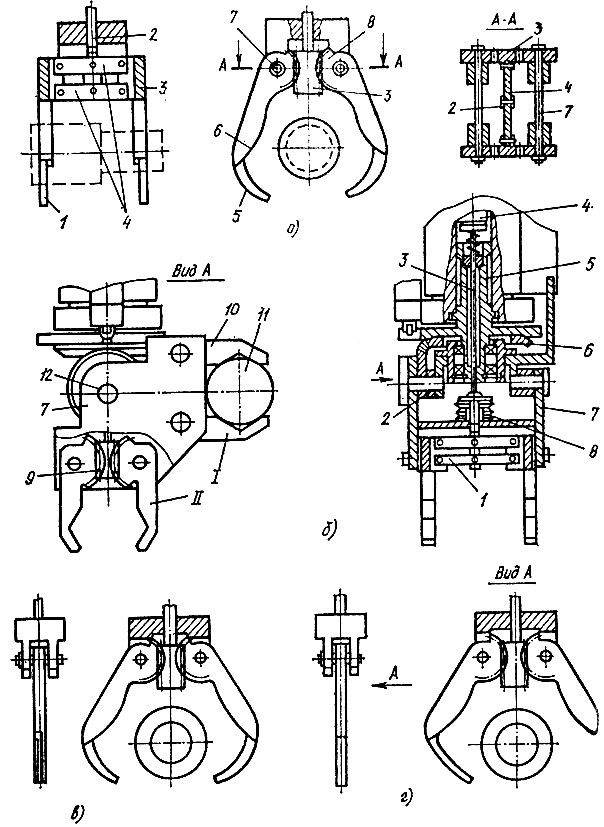
Рис. 2.5. Широкодиапазонные центрирующие ЗУ с реечными передаточными механизмами для деталей типа тел вращения
Однопозиционное ЗУ (рис. 2.5, а) предназначено для держания гладких и ступенчатых валов. Профиль губок обеспечивает центрирование валов в широком диапазоне размеров. Две пары поворотных губок 1 свободно сидят на осях 7. На губках выполнены зубчатые секторы 8, входящие попарно в зацепление с рейками 3, которые связаны рычагами 4, образующими шарнирный параллелограмм. Рычаги 4 шарнирно связаны с тягой 2 привода. Такое устройство обеспечивает независимую работу каждой пары губок, что необходимо при захватывании и центрировании ступенчатых валов. Участки профиля губок имеют меньшую (по сравнению с участками 6) толщину. Это обеспечивает подхватывание и утрирование деталей, расположенных с угловым смещением, а также гарантирует центрирование ступенчатой детали.
На рис. 2.5, б показано двухпозиционное центрирующее широкодиапазонное ЗУ для валов, обеспечивающее относительно короткий цикл установки-снятия заготовок и обработанных деталей. Работа его осуществляется следующим образом. ЗУ с заготовкой 11, зажатой губками 10 (позиция I), сомкнутыми под действием пружины 8, переносится на линию центров станка. При ?том губки ЗУ на позиции II под действием толкателя 3, имеющего свой привод 4, раскрыты (пружина 8 на позиции II сжата). При перемещении толкателя вверх пружина разжимается, приводя в действие рычаги 1 и рейку 9, вследствие чего губки на позиции II сжимается, захватывая обработанную деталь. После освобождения детали (например, из патрона или центров ранка вращением шпинделя 5 через коническое колесо и зубчатый сектор 2) корпус 7 с губками поворачивается вокруг оси 12 так" что позиция I занимает положение позиции II и заготовка 11 может быть установлена "патрон или центры станка.
На рис. 2.5, в и г показаны двухпальцевые центрирующие широкодиапазонные ЗУ для деталей типа колец и фланцев, принцип действия которых аналогичен описанному выше. ЗУ, представленное на рис. 2.5, г, отличается тем, что одна из его губок выполнена укороченной, чем обеспечивается компактность конструкции и достигаются меньшие зазоры между деталями, лежащих в ориентирующей таре; однако для таких конструкций требуется точная симметрия расположения ЗУ и детали перед ее зажимом.
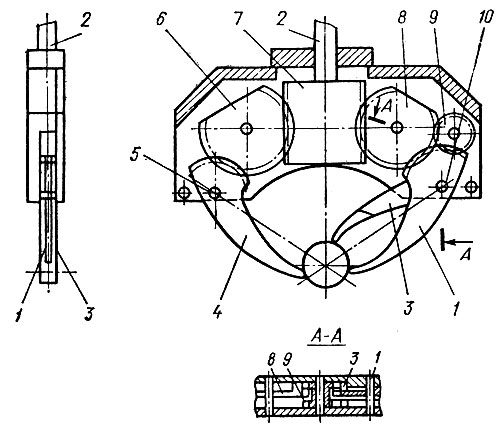
Рис. 2.6. Центрирующее ЗУ с реечными передаточными механизмами для деталей типа фланцев, дисков, зубчатых колес
Центрирующее широкодиапазонное ЗУ (рис. 2.6) оснащено тремя рабочими губками специального профиля, На которых выполнены зубчатые секторы. Губки 1 и 3 свободно сидят на общей оси, а губка 4 на оси 5. Зубчатые секторы губок 1 и 4 сцеплены с одинаковыми зубчатыми колесами 6 и 8, которые находятся в зацеплении с рейкой 7, соединенной с тягой 2 привода ЗУ. Зубчатый сектор 10 губки 3 связан с промежуточным лесом 9, сцепленным с колесом 8. При перемещении тяги 2 и рейки 7 все три губки поворачиваются к центру ЗУ на одинаковый угол, обеспечивая центрированы детали.
Сравнительные характеристики электромагнитных и вакуумных ЗУ приведены в табл. 2.2.
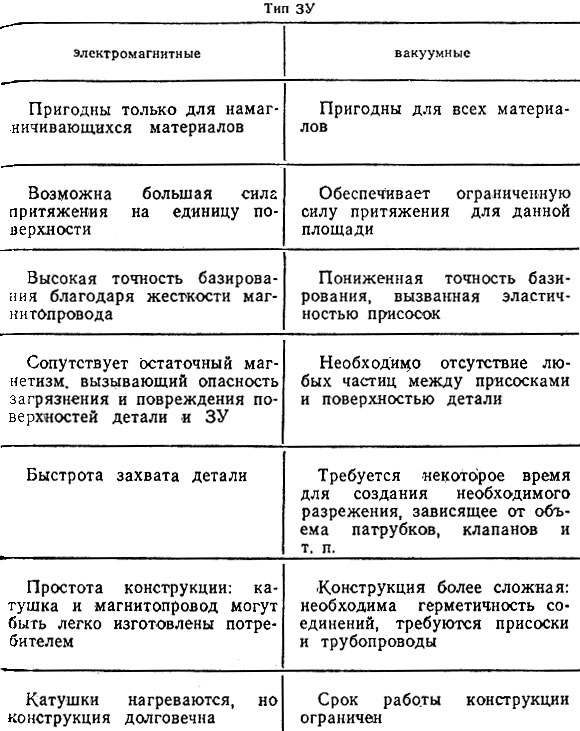
Таблица 2.2. Сравнительные характеристики ЗУ
Элементы вакуумных и электромагнитных ЗУ показаны на рис. 2.7. Основой вакуумных ЗУ являются присоски и устройства для создания вакуума. Простым и распространенным способом создания вакуума является применение эжекторов. В этом случае разрежение получается без специальной установки с помощью энергии сжатого воздуха, поступающего из заводской сети. Одна из конструкций эжектора представлена на рис. 2.7, а. Основой эжектора является тройник, в который вклеены или впаяны пробки с отверстиями малого диаметра
Электромагнитные ЗУ (рис. 2.7, б) компонуют из небольших электромагнитов, устанавливаемых на обшей раме. Такие устройства обычно применяют для перенос фасонных, круглых, ребристых и решетчатых поверхностей, захватить которые вакуумными ЗУ трудно или " возможно. Иногда применяют ЗУ с постоянными манитами, однако они требуют устройств для закрепления дали на позиции разгрузки или оснащения их специальными сбрасывателями.
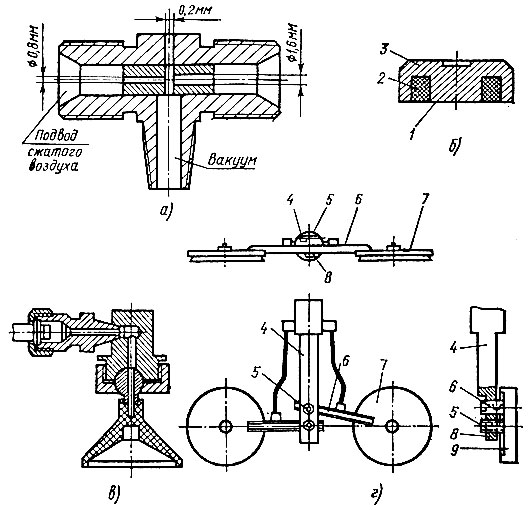
Рис. 2.7. Элементы вакуумных и электромагнитных ЗУ: а - схема эжектора, б - схема электромагнита, в - пневмоприсоска с шаровой опорой, г - пример устройства для крепления удерживающих элементов электромагнитных или вакуумных захватов
Присоски изготовляются из резины или пластика. На рис. 2.7, в показана конструкция присоски с шаровой опорой, которую можно закреплять к патрубку в любом нужном положении Обычно для захватывания дали используют несколько присосок.
Подъемные электромагниты (рис. 2.7, б) состоят из корпуса 3, выполненного из низкоуглеродистой стали, внутри которого размещены катушки магнита 2, защищенные от повреждений листом 1 из марганцовистой стали или латуни.
Устройство для крепления удерживающих элементов (рис. 2.7, г) может быть выполнено с использованием присосок или магнитов. Оно содержит корпус 4 с отверстиями, в которые помещены резьбовые втулки 8, имеющие поперечные просверленные отверстия, куда вставляют держатели 6, несущие вакуумные присоски 7 или магниты 9. К плоскости корпуса 4 держатели 6 прижимаются винтами 5, проходящими через втулки 8. Передвигая держатели в сверлениях втулок 8 и поворачивая их на нужные углы относительно корпуса 4, можно в широких пределах менять относительное расположение захватных элементов.
ЗУ с эластичными камерами известны двух жидов: с расширяющимися и изгибающимися камерами.
Эти ЗУ применяют для переноса хрупких изделий небольшой массы неправильной формы или со значительными отклонениями формы и размеров. Действие ЗУ основано на деформации эластичной камеры от давления воздуха или жидкости. ЗУ с эластичными камерами применяют для удержания деталей как за наружную, так и за внутреннюю поверхность.
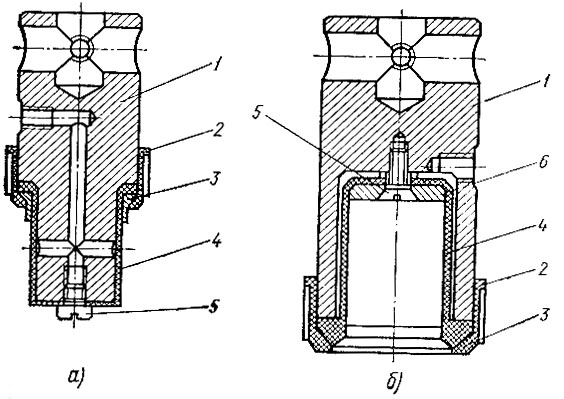
Рис. 2.8. Центрирующие ЗУ с расширяющимися эластичными камерами: а - для удержания деталей по внутреннему диаметру, б - для удержания деталей по их наружному диаметру
ЗУ с расширяющимися эластичными камерами показаны на рис. 2.8. Втулка 4, изготовленная из пластмассы или резины, крепится к корпусу 1 через промежуточное кольцо 3 гайкой 2 и винтом 5. При этом может быть использована промежуточная шайба 6. Сжатый воздух подается в камеру через отверстия в корпусе 1. При подаче воздуха камера раздувается и удерживает деталь за отверстие (рис. 2.8, а) или за наружный диаметр (рис. 2.8, б).
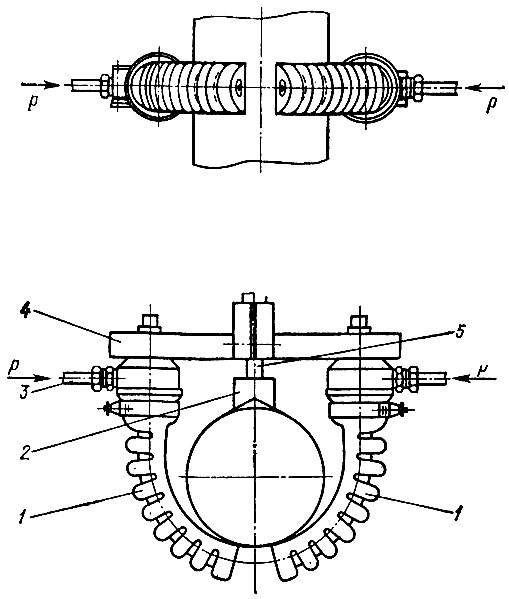
Рис. 2.9. ЗУ с изгибающимися эластичными камерами
ЗУ с изгибающимися эластичными камерами для захватывания объектов за наружную поверхность показаны на рис. 2.9. На корпусе 4 закреплены базирующая призма 2 и пара эластичных камер 1, соединенных с пневмоприводом посредством патрубков 3. Профиль камер выполнен с переменной жесткостью, поэтому при подаче сжатого воздуха камеры изгибаются и прижиме ют захваченную деталь к базирующей призме. Переналадка ЗУ на другой типоразмер изделия осуществляете я переустановкой камер в пазах корпуса 4. Высота расположения призмы 2 регулируется с помощью резьбового держателя 5.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'