Глава 1. Механические цепи и электропривод
1. Кинематические схемы
Упрощенная кинематическая схема руки человека представлена на рис. 1. Число степеней свободы такой руки равно 27. Это
обеспечивает осуществление разнообразнейших двигательных решений, причем в структуре этого механизма отсутствует алгоритмическая последовательность отдельных операций, т. е. его схема не фиксирует в себе определенной программы движения.
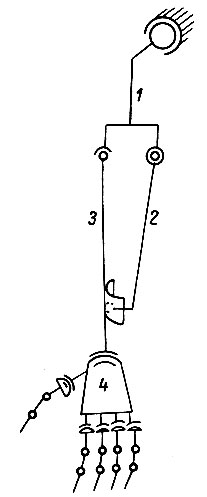
Рис. 1
На рис. 2 приведена схема руки, робота, которая имеет семь степеней свободы. Вращение руки в шарнирах 1,2,3 используется для переноса предметов в заданную точку, а вращение в шарнирах 4,5,6 - для ориентирования предмета в точке. С помощью охвата 7 рука удерживает предмет. Шарниры 1-6 соединены стержнями. Схват перемещается в сферической системе координат, В схеме манипулятора на рис. 3 движения по направлениям 1,2,3 используются для переноса детали в цилиндрической системе координат. Кисть может совершать движения для ориентации по направлениям 4, 5, 6. Стрелкой 7 обозначено движение охвата. При повороте кисти по стрелке 4 схват может опускаться вниз на значительное расстояние, что увеличивает объем рабочей зоны руки.
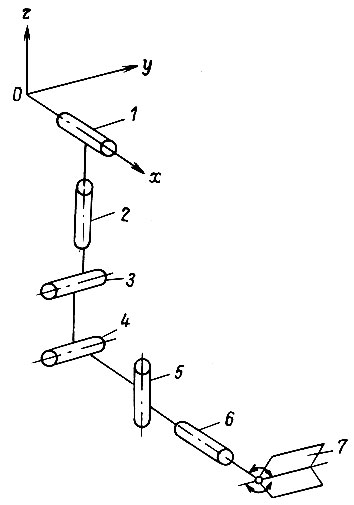
Рис. 2
Возможно осуществление пространственного движения охвата по сферическим поверхностям путем сочетания прямолинейных перемещений отдельных звеньев. На рис.4 показан трехзвенный шарнирный механизм, состоящий из жесткого стержня 1 и двух подвижных звеньев 2 и 3. При одновременном одинаковом сокращении или удлинении звеньев 2,3, что может достигаться втягиванием или выдвижением штоков электромеханизмов, происходит поворот стержня в плоскости чертежа. Если одно из звеньев 2,3 удлиняется, а другое укорачивается, то конец стержня 1 перемещается в других плоскостях.
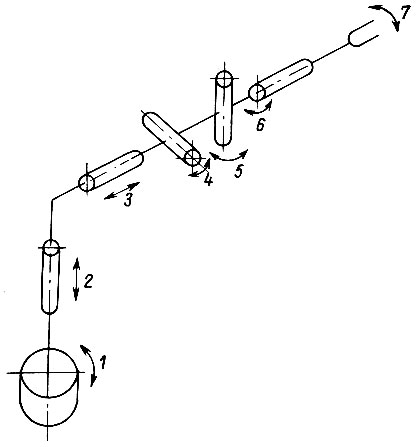
Рис. 3
Для роботов необходимо иметь всевозможные схваты: механические с жесткими или пружинящими губками, с вакуумными присосами, с электромагнитами, с сенсорными датчиками. Разрабатываются механизмы схватов с пальцами, сходные с рукой человека. Такие механизмы должны обеспечивать независимость движения каждого пальца и координацию относительного движения пальцев.
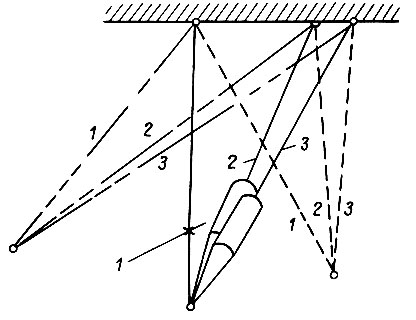
Рис. 4
Приводные двигатели располагаются либо непосредственно в суставах рук, либо за пределами рабочей зоны манипулятора. Передача движения через сустав производится механизмами, схемы которых изображены на рис. 5. Эти механизмы имеют соответственно три и две степени свободы. Угловые скорости элементов механизмов связаны уравнениями
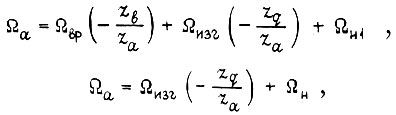
где Ωа, Ωвр - скорости вращения входного и выходного валов; Ωизг - скорость изгиба сустава; Ωн1, Ωн - скорости вращения охватывающих звеньев; za, zв, zq - число зубьев колес а, в, q.
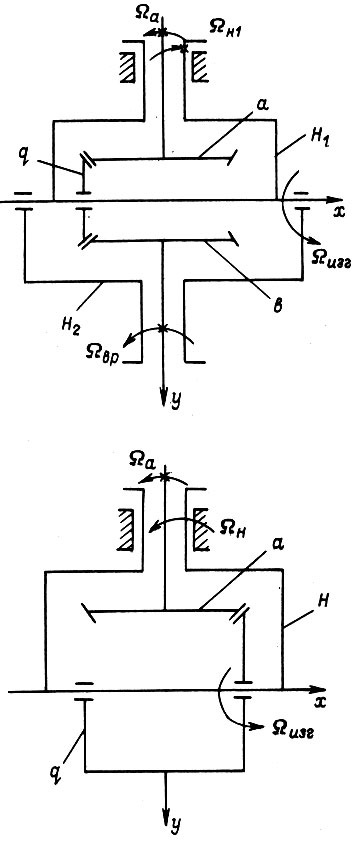
Рис. 5
Исполнительные системы роботов управляются от носителя программы или от оператора. Во втором случае кинематическая схема для каждой степени свободы делится на две части: одна относится к исполнительному каналу, вторая - к каналу оператора. Системы привода являются обратимыми. Известны также устройства, получившие название экзоскелетонов. Шарнирные соединения экзоскелетона снабжены приводами, управляемыми биотоками мышц человека, облаченного в экзоскелетон. Перемещение руки начинается уже через несколько миллисекунд после сокращения мышц.
Разрабатываются конструкции шагающих устройств. На рис. 6 показана платформа, в которой каждая из трех стоек имеет две опоры со своим приводом. Движение робота происходит периодически, причем во время выноса стоек в первоначальное положение платформа неподвижна и находится на поверхности. Известны конструкции устройств подобного типа, в которых при увеличении количества ног вдвое подготовка следующего шага одной группы стоек происходит во время цикла передвижения платформы на другой группе стоек. Такие устройства обеспечивают более плавное движение платформы с манипулятором с уменьшенными вертикальными колебаниями.
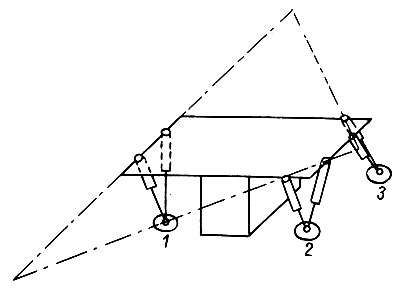
Рис. 6
Перспективным является создание приводных устройств, в которых движитель не сосредоточен, а распределен внутри объема конечностей. Например, в работе [5] указано на возможность построения неэлектрического устройства на мышечных элементах Маккибена. Элемент состоит из расширяющейся резиновой трубки в оплетке. Концы трубки и оплетки закреплены во втулках, причем одна втулка глухая, а через другую подается газ, раздувающий искусственную мышцу. В той же работе есть ссылка на опыт с синтетическим волокном.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'