3. Электрические цепи о двигателями постоянного тока
На рис. 10 изображены схема широтно-импульсного управления двигателем и диаграммы напряжения на якоре Uя и тока якоря iя при переключении транзисторов  попарно и в противофазе.
попарно и в противофазе.
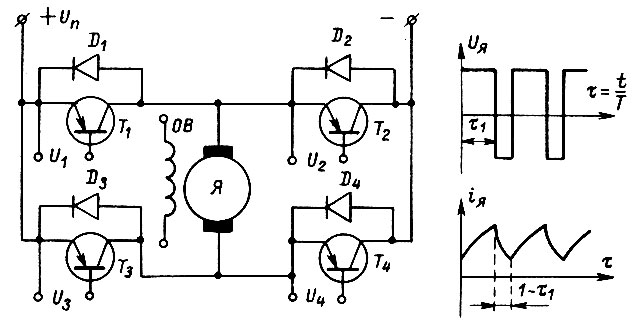
Рис. 10
Средний ток в якоре

где  - сопротивление якорного контура; У - э. д. с. вращения;
- сопротивление якорного контура; У - э. д. с. вращения;  t1 - длительность отпертого состояния
t1 - длительность отпертого состояния  - период переключения транзисторов. Току
- период переключения транзисторов. Току  соответствует механическая характеристика привода
соответствует механическая характеристика привода

где cд - конструктивный коэффициент;  Момент короткого замыкания
Момент короткого замыкания  равен
равен

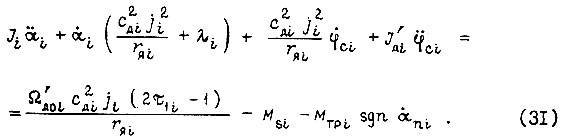
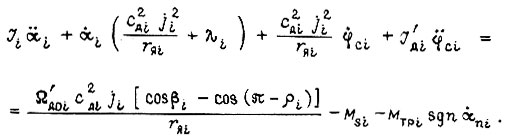
Пользуясь уравнениями (10), (11), (12) и (30), получаем описание движения i-го привода робота:
Однополярным импульсным напряжениям на якоре (рис. 10) соответствуют диаграммы управляющих напряжений  приведенные на рис. 11. При вращении вперед T3 заперт, а T4 открыт. На интервале с относительной длительностью τ1 транзистор T1 открыт, а T2 заперт. Положительный полюс источника питания присоединен к верхнему зажиму обмотки якоря. При запирании T1 и отпирании T2 (пауза) ток якоря течет в прежнем направлении через
приведенные на рис. 11. При вращении вперед T3 заперт, а T4 открыт. На интервале с относительной длительностью τ1 транзистор T1 открыт, а T2 заперт. Положительный полюс источника питания присоединен к верхнему зажиму обмотки якоря. При запирании T1 и отпирании T2 (пауза) ток якоря течет в прежнем направлении через  При некотором малом моменте статической нагрузки на валу этот ток изменяет направление, что в дальнейшем (в импульсе) приводит к некоторой рекуперации энергии. При вращении назад T1 заперт, T2 включен, а с регулируемой длительностью τ1 переключаются транзисторы T3, T4.
При некотором малом моменте статической нагрузки на валу этот ток изменяет направление, что в дальнейшем (в импульсе) приводит к некоторой рекуперации энергии. При вращении назад T1 заперт, T2 включен, а с регулируемой длительностью τ1 переключаются транзисторы T3, T4.
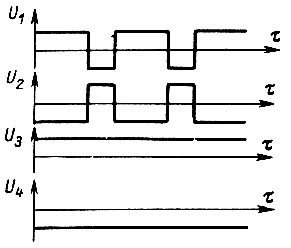
Рис. 11
Механическая характеристика привода

С учетом (32) из выражений (10), (11), (12) получаем
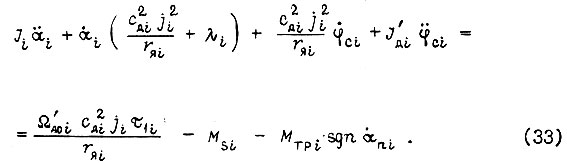
Механические характеристики, построенные по формуле (29) (биполярные импульсы  ), приведены на рис. 12, а характеристики (32) (однополярные импульсы ) - на рис. 13. Пунктиром отмечена граница области переменного тока. Для характеристики ab показано ее продолжение bc, когда в точке b в приводе начинает действовать отрицательная обратная связь по току якоря. Аналогично характеристика cd имеет излом в точке d. При переходе от ab к bc и от cd к da скачком изменяются скорость
), приведены на рис. 12, а характеристики (32) (однополярные импульсы ) - на рис. 13. Пунктиром отмечена граница области переменного тока. Для характеристики ab показано ее продолжение bc, когда в точке b в приводе начинает действовать отрицательная обратная связь по току якоря. Аналогично характеристика cd имеет излом в точке d. При переходе от ab к bc и от cd к da скачком изменяются скорость  и момент короткого замыкания Mк.
и момент короткого замыкания Mк.
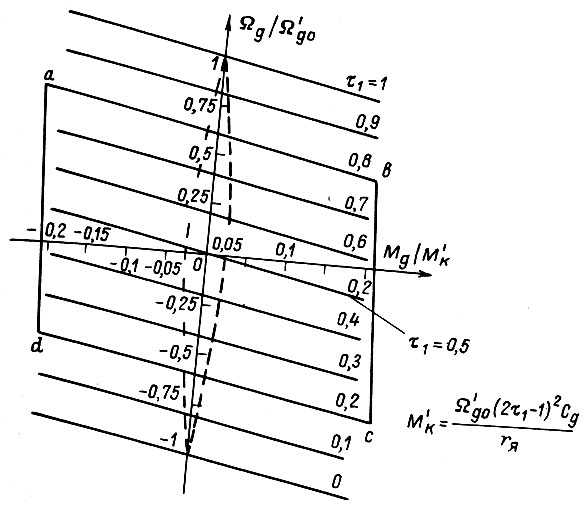
Рис. 12
Если внутреннее сопротивление источника питания с напряжением Un (рис.10) соизмеримо с rя, то требуется уточнение характеристик (29), (32) и моментов Mк. Это необходимо при использовании электромашинного генератора с параллельно включенной аккумуляторной батареей, что может встретиться на передвижных объектах.
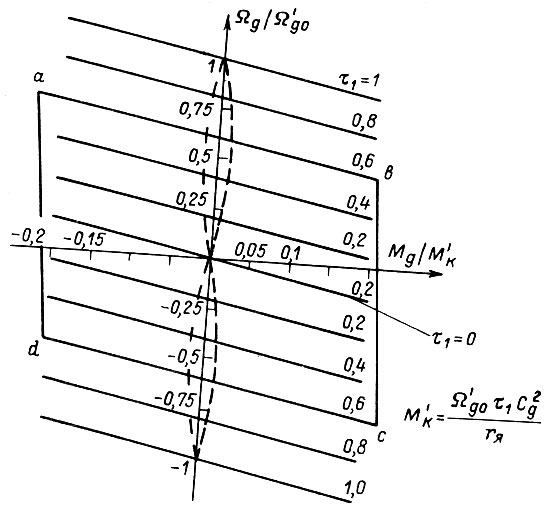
Рис. 13
Учтем электромагнитную инерцию цепи якоря в системе уравнений
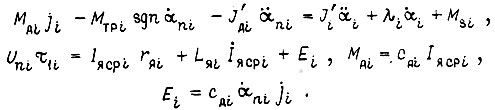
Здесь первое уравнение соответствует уравнениям (6), (7), (8);  - индуктивность якорной цепи i-uj двигателя; Ei - э. д. с. вращения; второе уравнение относится к варианту с однополярными импульсами напряжения -
- индуктивность якорной цепи i-uj двигателя; Ei - э. д. с. вращения; второе уравнение относится к варианту с однополярными импульсами напряжения -  Получаем дифференциальное уравнение движения i-го привода робота
Получаем дифференциальное уравнение движения i-го привода робота
Для случая биполярных импульсов заменяем в уравнении (34) τ1i на 2τ1i - I. С повышением номинальной мощности двигателя основное внимание следует уделять увеличению коэффициента его использования 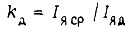 где
где  - действующее значение тока. Здесь вариант с однополярными импульсами более предпочтителен.
- действующее значение тока. Здесь вариант с однополярными импульсами более предпочтителен.
Из-за пульсаций момента Мд имеют место пульсации скорости вращения Ωд, которые можно определить следующим образом [7]:
где  - перепад тока
- перепад тока  за период
за период  - момент инерции привода, приведенный к валу двигателя.
- момент инерции привода, приведенный к валу двигателя.
Для уменьшения пульсаций  необходимо повысить частоту переключения транзисторов. Частоту переключения
необходимо повысить частоту переключения транзисторов. Частоту переключения  выбирают в соответствии с неравенством [7]
выбирают в соответствии с неравенством [7]

где  - коэффициент, равный отношению среднего тока транзистора к амплитуде тока коллектора;
- коэффициент, равный отношению среднего тока транзистора к амплитуде тока коллектора;  - ток коллектора, соответствующий току короткого замыкания двигателя;
- ток коллектора, соответствующий току короткого замыкания двигателя;  - ток, соответствующий номинальному току якоря;
- ток, соответствующий номинальному току якоря;  - допустимая кратность пускового тока двигателя;
- допустимая кратность пускового тока двигателя;  - постоянная времени электромагнитной цепи якоря. Перспективно использование силовых интегральных схем, в которых транзисторы работают параллельно и каждый из них автоматически может быть выключен при достижении допустимого перегрева. Этим достигают малого
- постоянная времени электромагнитной цепи якоря. Перспективно использование силовых интегральных схем, в которых транзисторы работают параллельно и каждый из них автоматически может быть выключен при достижении допустимого перегрева. Этим достигают малого  при высокой частоте f.
при высокой частоте f.
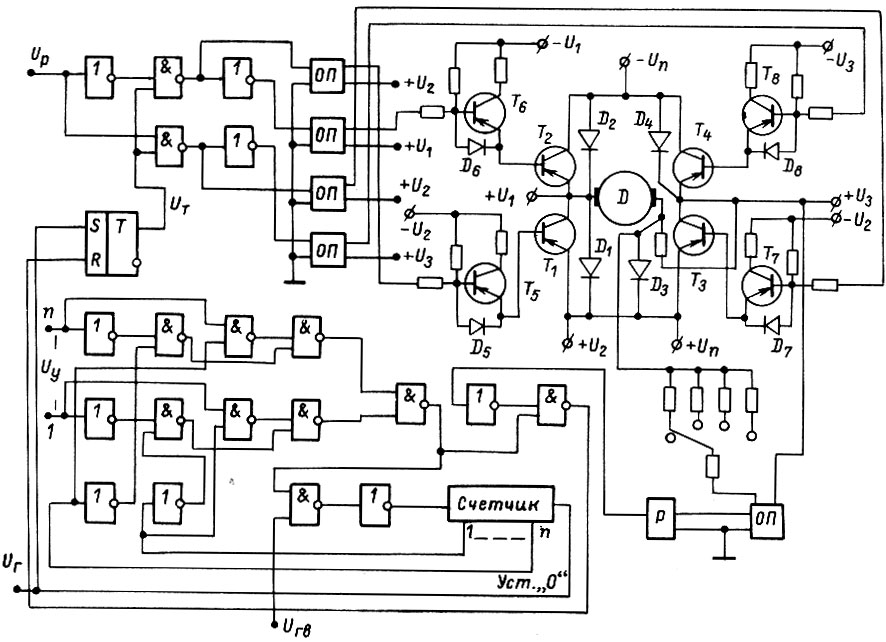
Рис. 14
На рис. 14 изображена схема силового каскада на составных транзисторах и логическая часть, обеспечивающая однополярность . импульсов напряжения (Р - реле, ОП - оптроны). Если входной сигнал  эквивалентен булевой единице, то двигатель вращается вперед, при
эквивалентен булевой единице, то двигатель вращается вперед, при  - назад. Сигнал
- назад. Сигнал  представлен двоичным числом, имеющим n разрядов, и равен разности сигнала задания и сигнала задержанной связи по току. Длительность τ1 импульса пропорциональна числу . На вход
представлен двоичным числом, имеющим n разрядов, и равен разности сигнала задания и сигнала задержанной связи по току. Длительность τ1 импульса пропорциональна числу . На вход  поступают импульсы постоянной частоты от генератора, на вход
поступают импульсы постоянной частоты от генератора, на вход  - импульсы высокой частоты. Элементы ОП, Р реализуют операцию инверсии. Триггер SR - типа переключается в единичное состояние импульсом , в нулевое состояние - в тот момент времени, когда число становится эквивалентным числу, записываемому в счетчике. Импульс соответствует единичному состоянию триггера, пауза - нулевому. При превышении током якоря iя допустимой величины срабатывает реле Р, и двигатель отключается от источника питания с напряжением Un.
- импульсы высокой частоты. Элементы ОП, Р реализуют операцию инверсии. Триггер SR - типа переключается в единичное состояние импульсом , в нулевое состояние - в тот момент времени, когда число становится эквивалентным числу, записываемому в счетчике. Импульс соответствует единичному состоянию триггера, пауза - нулевому. При превышении током якоря iя допустимой величины срабатывает реле Р, и двигатель отключается от источника питания с напряжением Un.
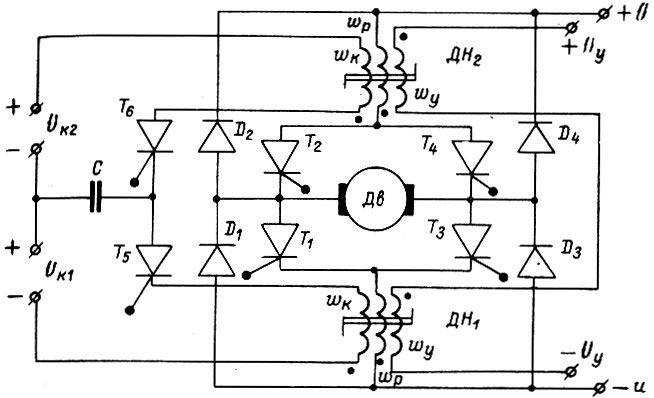
Рис. 15
Схема тиристорного каскада с широтно-импульсным управлением показана на рис. 15. Запирание тиристоров производится в результате действия дросселей насыщения ДН1 и ДН2. В открытом состоянии Т4 периодически коммутируются Т1 и Т2 (Т3 заперт), двигатель вращается вперед. Движение в обратную сторону обеспечивается коммутацией Т3, Т4 при закрытом Т1 и отпертом Т2. Импульсы напряжения к управляющим электродам тиристоров могут поступать от логической схемы, модулирующей их длительность, через оптронные пары. В процессе коммутации схемы рабочая точка ДН1 или ДН2, выходит на вертикальный участок петли кривой намагничивания сердечника, где магнитная проницаемость увеличивается в сотни или тысячи раз по сравнению с проницаемостью в области насыщения, имеющей место в остальное время. Обмотки управления ДН1, ДН2. питаются от отдельного источника тока. В момент отпирания тиристора Т5ДН1 выходит из насыщения, конденсатор С перезаряжается по контуру  Импульс напряжения, появляющийся на обмотке
Импульс напряжения, появляющийся на обмотке  запирает Т1 (или Т3), ток якоря двигателя замыкается через
запирает Т1 (или Т3), ток якоря двигателя замыкается через  (или Т2, D4). Отпирание Т6 приводит к закрытию Т2 (или Т4), при этом подается импульс отпирания на управляющий электрод Т1 (или Т3). Время задержки включения второй пары тиристоров моста при команде на реверс привода должно быть не меньше двух периодов коммутации. Напряжение на конденсаторе с целью снижения установленной мощности коммутирующего оборудования можно регулировать в зависимости от тока, нагружающего обмотку якоря [8].
(или Т2, D4). Отпирание Т6 приводит к закрытию Т2 (или Т4), при этом подается импульс отпирания на управляющий электрод Т1 (или Т3). Время задержки включения второй пары тиристоров моста при команде на реверс привода должно быть не меньше двух периодов коммутации. Напряжение на конденсаторе с целью снижения установленной мощности коммутирующего оборудования можно регулировать в зависимости от тока, нагружающего обмотку якоря [8].
Рис. 16
Рассмотрим тиристорные схемы, выпрямляющие переменное напряжение питающего источника, на примере однофазных двухполупериодных выпрямителей. На рис. 16 показаны силовая и логическая части привода с раздельным управлением двух групп тиристоров. Каждый тиристор с усилителем может представлять собой оптронную пару. Через U0 обозначено напряжение на вторичной обмотке силового трансформатора Трс между точками 1,2; Uy - сигнал управления, представленный двоичным числом, имеющим n разрядов; UГ - импульсы от генератора постоянной частоты. Привод вращается вперед, если сигнал Uр = 1, и назад при Uр = 0. В первом случае отпираются в свои полупериоды напряжения Uс тиристоры Т2, Т4, во втором - T1, Т3. В управляющих электродах тиристоров суммируются токи, создаваемые усилителем, соединенным с выходом логической схемы, и блоком фиксированных импульсов (БФИ). Эти импульсы отпирают тиристоры всегда с постоянным электрическим углом, близким к π, уменьшая при реверсе привода необходимую выдержку времени между выключением первой группы и включением второй. Датчик максимального тока якоря Dт работает как релейная схема, запрещающая управление при недопустимо большом токе iя. При U0>0 на выходе реле Р появляется булева единица, при U0<0 - булев нуль. Во время перехода от единицы к нулю, и наоборот, появляется импульс, устанавливающий счетчик в нуль. Последующее заполнение счетчика импульсами Uг приводит к тому, что при совпадении записываемого числа и числа Uy появляется ток, отпирающий соответствующий тиристор. На схеме не показана электрическая цепь задержанной связи по току iя.
Среднее значение напряжения выпрямителя в режиме непрерывного тока iя есть

где  - эффективное значение фазного анодного напряжения; m - число фаз (для схемы на рис. 16 m = 2);
- эффективное значение фазного анодного напряжения; m - число фаз (для схемы на рис. 16 m = 2);  - угол отпирания тиристора, отсчитываемый от начала синусоиды фазного напряжения. Механическая характеристика системы выпрямитель - двигатель в упрощенной форме имеет вид
- угол отпирания тиристора, отсчитываемый от начала синусоиды фазного напряжения. Механическая характеристика системы выпрямитель - двигатель в упрощенной форме имеет вид

где  для схемы на рис. 16
для схемы на рис. 16 
Момент короткого замыкания 

Подставим (38) в уравнение движения i-го привода робота (исходя из (10)-(12)):
Для привода с линейным двигателем

где  - линейная скорость идеального холостого хода двигателя;
- линейная скорость идеального холостого хода двигателя; 
С учетом электромагнитной энерции якорной цепи вид дифференциального уравнения движения i-го привода становится аналогичным уравнению (34):
В области прерывистого тока якоря  среднее выпрямленное напряжение
среднее выпрямленное напряжение

где ω - угловая частота анодного напряжения;  - угол прекращения протекания тока через тиристор, отсчитываемый от начала синусоиды фазного напряжения; E - э. д. с. вращения двигателя;
- угол прекращения протекания тока через тиристор, отсчитываемый от начала синусоиды фазного напряжения; E - э. д. с. вращения двигателя;  - угол, зависящий от параметров цепи нагрузки и величины тока и определяющий время прохождения тока через тиристор.
- угол, зависящий от параметров цепи нагрузки и величины тока и определяющий время прохождения тока через тиристор.
После интегрирования получаем выражение для среднего значения тока якоря

где 
Оно может быть использовано для расчета механических характеристик привода, если известно  и вычислено φ при заданной э. д. с. E.
и вычислено φ при заданной э. д. с. E.
Все величины, необходимые для построения  получаем после расчета параметров силового трансформатора и выбора тиристоров [9 ]. На рис. 17 показан вид механической характеристики.
получаем после расчета параметров силового трансформатора и выбора тиристоров [9 ]. На рис. 17 показан вид механической характеристики.
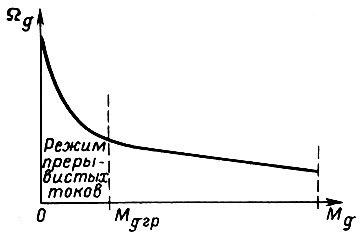
Рис. 17
Обратимся теперь к расчетной механической схеме на рис. 9 д со скручивающимся валом привода i-й степени свободы робота, имея в виду управление двигателя от тиристорного выпрямителя. Ограничимся областью непрерывного тока , отсутствием электромагнитной инерции и вязкого трений, а также условием  Уравнения для вала, расположенного между двигателем и шарниром рабочего органа:
Уравнения для вала, расположенного между двигателем и шарниром рабочего органа:


где 
 - момент инерции двигателя;
- момент инерции двигателя; 
 определяется по уравнениям (3)-(5);
определяется по уравнениям (3)-(5);  - угол поворота вала двигателя, уменьшенный в j раз;
- угол поворота вала двигателя, уменьшенный в j раз;  - угол поворота i-го звена рабочего органа. Заменяем (43) и (44) одним уравнением
- угол поворота i-го звена рабочего органа. Заменяем (43) и (44) одним уравнением

Опустим в (45) индекс i, подставив  из (6)-(8):
из (6)-(8):
Механическая характеристика двигателя


находим из (44), подставив 
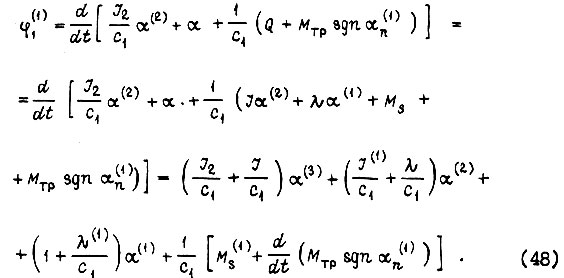
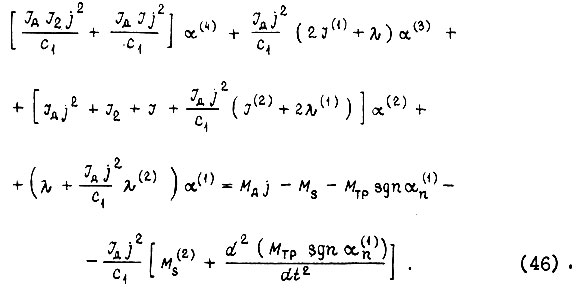
Раскрыв  в формуле (47) с помощью (48) и (38) и подставив момент двигателя M в выражение (46), приходим к уравнению движения привода
в формуле (47) с помощью (48) и (38) и подставив момент двигателя M в выражение (46), приходим к уравнению движения привода
Отсюда следует, что порядок дифференциального уравнения движения звена рабочего органа увеличивается на два по сравнению с выражением (39), где не учитывалось скручивание вала. Косинусоидальная зависимость выпрямленного напряжения от β вносит новую нелинейность. Переход привода в режим прерывистого тока якоря и наличие токоограничивающей обратной связи, а также условие  еще более усложняют анализ и синтез процесса управления. Включение сглаживающего дросселя последовательно с обмоткой якоря уменьшает возможность перехода привода в область прерывистого тока , уменьшает пульсации скорости , но увеличивает инерционность системы.
еще более усложняют анализ и синтез процесса управления. Включение сглаживающего дросселя последовательно с обмоткой якоря уменьшает возможность перехода привода в область прерывистого тока , уменьшает пульсации скорости , но увеличивает инерционность системы.
Если задана траектория движения каждого звена рабочего органа, то по  находим электрические углы отпирания тиристоров выпрямителей
находим электрические углы отпирания тиристоров выпрямителей  во всех указанных случаях, описываемых уравнениями (39)-(41), (49). Снижение волновых деформаций изгиба звеньев как однородных балок
во всех указанных случаях, описываемых уравнениями (39)-(41), (49). Снижение волновых деформаций изгиба звеньев как однородных балок  и волновых деформаций скручивания валов обеспечивается синтезом оптимальных траекторий звеньев и добавочных контуров управления выпрямителями.
и волновых деформаций скручивания валов обеспечивается синтезом оптимальных траекторий звеньев и добавочных контуров управления выпрямителями.
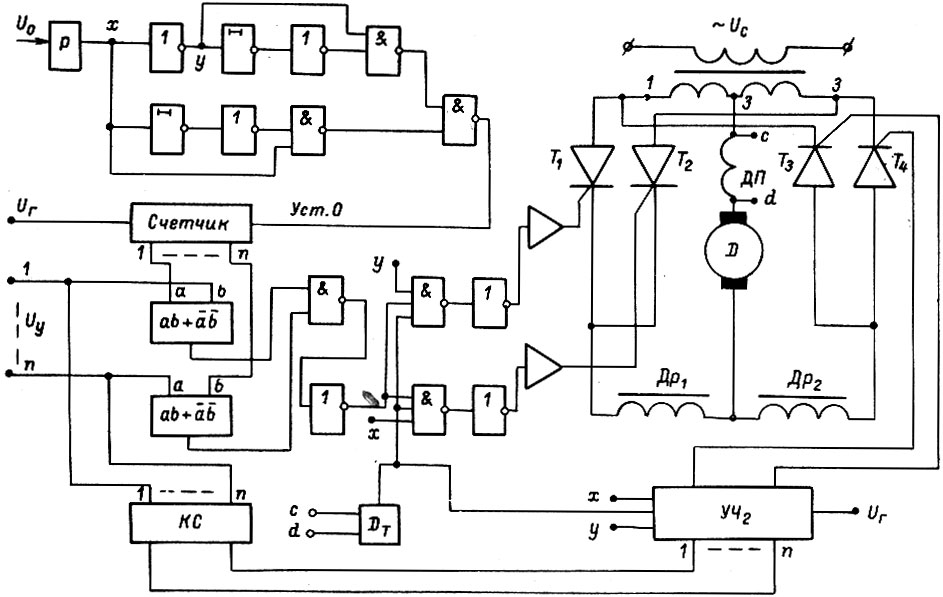
Рис. 18
На рис. 18 изображена схема с согласованным управлением групп тиристоров  Управление первой группой (Т1, Т2) производится так же, как и тиристорами
Управление первой группой (Т1, Т2) производится так же, как и тиристорами  в схеме на рис. 16. Команда реверса привода отсутствует. Отпирающие импульсы к
в схеме на рис. 16. Команда реверса привода отсутствует. Отпирающие импульсы к  поступают от второй управляющей части системы
поступают от второй управляющей части системы  , построенной аналогично. Но на вход поступает двоичное число, которое представляет собой число преобразованное комбинационной логической схемой кс. Это преобразование осуществлено в соответствии с формулой
, построенной аналогично. Но на вход поступает двоичное число, которое представляет собой число преобразованное комбинационной логической схемой кс. Это преобразование осуществлено в соответствии с формулой

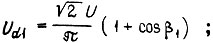
где β - угол регулирования выпрямительной группы; ρ - угол опережения инверторной группы; ΔU - падение напряжения на тиристоре;  - выпрямленное напряжение холостого хода.
- выпрямленное напряжение холостого хода.
В схеме на рис. 18 отсутствует постоянная составляющая уравнительного тока, протекающего между группами тиристоров, переменная же составляющая может достигать значительной величины без ограничивающего сопротивления. С целью ее ограничения в схему включены дроссели др1 и др2. Управление группами производится при условии, что ток якоря не превышает допустимой величины. Ток контролируется с помощью датчика максимального тока Dт. Для получения механических характеристик экскаваторного типа должна быть реализована в приводе задержанная отрицательная обратная связь по току якоря. Тогда есть разность между задающим сигналом и сигналом обратной связи по току в цифровой форме. Повышение жесткости механических характеристик обеспечивается связью по скорости . Схема на рис. 18 имеет преимущество, состоящее в плавности перехода системы привода через ток  При раздельном управлении групп тиристоров плавность нарушается вследствие возникновения прерывистого тока в области значений , близких к нулю. В этом случае для повышения плавности требуется добавочное регулирование выпрямляемых напряжений при Для согласованного управления групп остаются справедливыми соотношения (39)-(41), (49).При одновременной работе групп в выпрямительном режиме вместо cos β в уравнения подставляется разность
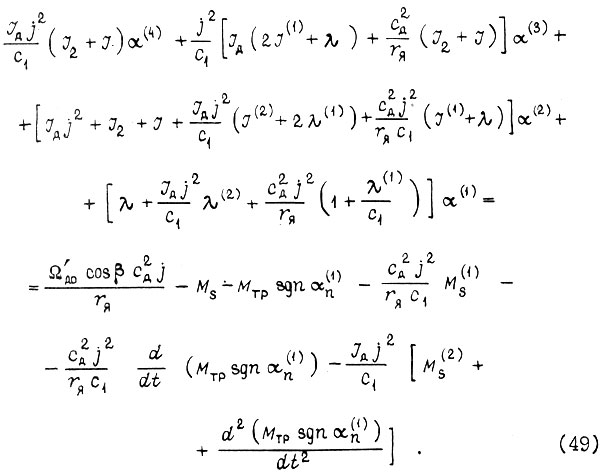
При раздельном управлении групп тиристоров плавность нарушается вследствие возникновения прерывистого тока в области значений , близких к нулю. В этом случае для повышения плавности требуется добавочное регулирование выпрямляемых напряжений при Для согласованного управления групп остаются справедливыми соотношения (39)-(41), (49).При одновременной работе групп в выпрямительном режиме вместо cos β в уравнения подставляется разность  Например, по аналогии с (39) имеем уравнение относительно угла поворота i-го привода
Например, по аналогии с (39) имеем уравнение относительно угла поворота i-го привода
На рис. 19 показаны схемы с двигателями последовательного возбуждения, применение которых целесообразно для установившихся гармонических движений приводов, что следуем из построения их нагрузочных характеристик [4]. Использование двухобмоточного двигателя дает возможность применять выпрямители, работающие на нагрузку со средней точкой. В такой схеме (рис.19а ) исключается возможность появления уравнительных токов. Протеканию тока в обмотке OB1 соответствует движение привода вперед, в обмотке OB2 - назад. Шунтирование цепи нагрузки обратными диодами повышает эффективность схемы. В схеме на рис. 19 б якорь двигателя импульсным способом шунтируется тиристорами T3, T4, что обеспечивает дополнительный ток в обмотке возбуждения OB1 и повышает жесткость механических характеристик в области малых токов якоря . Ток в обмотке OB2 включается или полностью выключается выпрямителем УВ. Тиристоры T1 и T2 отпираются при угле регулирования, равном β0. Тиристоры T3 и T4 отпираются при угле 
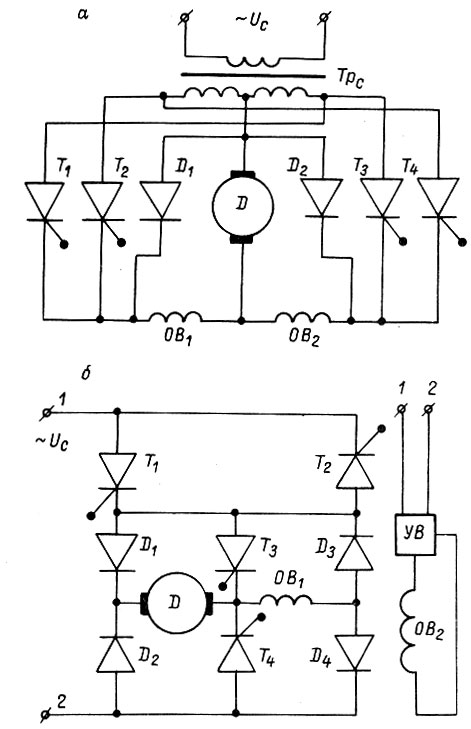
Рис. 19
После шунтирования якоря ток в цепи OB1 увеличивается, а ток якоря, падает. В момент t = π/ω основной тиристор  запирается анодным напряжением, ток OB1 начинает спадать по контуру
запирается анодным напряжением, ток OB1 начинает спадать по контуру  или
или  После момента времени
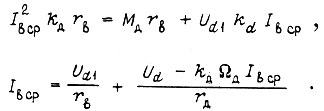
После момента времени  ток якоря увеличивается, а ток OB1 падает до тех пор, пока они не станут равными. Далее процессы повторяются. Средние токи якоря и возбуждения
ток якоря увеличивается, а ток OB1 падает до тех пор, пока они не станут равными. Далее процессы повторяются. Средние токи якоря и возбуждения  Равны
Равны

где 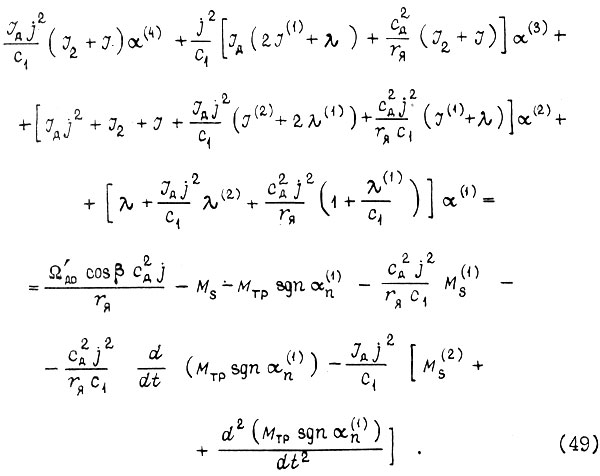
 - сопротивление обмотки OB1. Для ненасыщенной машины э. д. с.
- сопротивление обмотки OB1. Для ненасыщенной машины э. д. с. 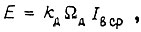 момент
момент  Получаем систему уравнений
Получаем систему уравнений
Исключив из этих уравнений, приходим к выражению механической характеристики. Если шунтирование якоря отсутствует, то момент двигателя связан со скоростью формулой

Тогда уравнение относительно угла αi одного из приводов робота получает вид
Приводам робота требуется несколько выпрямительных схем. Возможна разработка схемы с одним выпрямителем, управляющим одновременно движениями всех звеньев. Но для каждого двигателя в схему добавляются свои шунтирующие и отделительные тиристоры, углы отпирания которых регулируются независимо.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'