5. Нагрузочные характеристики и расчет мощности привода
Двигатель может быть правильно выбран после того, как построены нагрузочные характеристики, т. е. зависимости скоростей от моментов сил для каждого двигателя, в переходном процессе. Эти нагрузочные характеристики получаем согласно законам движения звеньев робота, которые строим исходя из требуемой технологии и результатов синтеза оптимальных движений. По построенным нагрузочным характеристикам определяем максимальные момент и скорость привода. Если привод обладает ими, то заданный закон движения выполним. В дальнейшем после выбора редуктора оценивается номинальное значение мощности двигателя по известным продолжительностям работы и пауз. Если начальные и конечные значения траектории звена робота  и
и  произвольны (например, для следящих систем), то двигатель -выбирается по траектории, наиболее тяжелой с точки зрения получения
произвольны (например, для следящих систем), то двигатель -выбирается по траектории, наиболее тяжелой с точки зрения получения  и его нагрева. На рис. 24 приведены примеры упрощенных диаграмм ускорений
и его нагрева. На рис. 24 приведены примеры упрощенных диаграмм ускорений  замедлений
замедлений  и скоростей
и скоростей  двигателя робота с позиционным управлением по которым можно предварительно оценить На рис. 24 а изменения скорости вала двигателя при разгоне и торможении
двигателя робота с позиционным управлением по которым можно предварительно оценить На рис. 24 а изменения скорости вала двигателя при разгоне и торможении
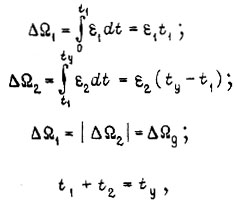
где  - время управления.
- время управления.
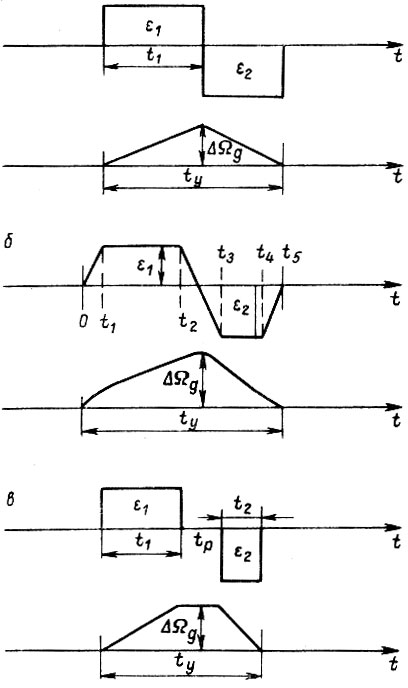
Рис. 24
Изменение угла поворота выходного вала

Время переключения  определяется из соотношения
определяется из соотношения

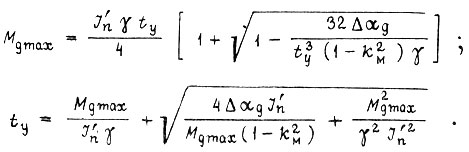
Время переходного процесса [4]

Здесь  - приведенный к двигателю момент инерции вала двигателя и редуктора;
- приведенный к двигателю момент инерции вала двигателя и редуктора; 
Уравнение нагрузочной характеристики привода получаем, используя приведенные выше формулы:
где 
Для диаграмм на рис. 24 б нагрузочная характеристика

где 
 на отрезках
на отрезках 

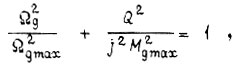
Для диаграмм на рис. 24 в нагрузочная характеристика имеет вид эллипса (как и на рис. 24 а.):
В формулах  не учтены обратные связи в приводе по
не учтены обратные связи в приводе по  Для нагрузочных характеристик, рассмотренных выше, принималось, что вращающий момент в шарнире
Для нагрузочных характеристик, рассмотренных выше, принималось, что вращающий момент в шарнире 
Кроме того, момент инерции  в величине которого должна учитываться переменность конфигурации рабочего органа робота в переходном процессе, также принимался постоянным. Следовательно, обоснование формы механической характеристики привода, внутри которой располагается нагрузочная характеристика, по приведенным выше формулам является весьма приближенным. Строгий расчет моментов сил (или сил при поступательных движениях) как функций скоростей перемещения звеньев робота при заданных желаемых тахограммах может быть выполнен исходя из уравнения Лагранжа. Действие обратных связей по скорости и моменту силы, вводимых в систему привода для обеспечения требуемой стабильности скорости на одних участках механической характеристики системы и стабильности момента на других участках, изменяет форму механической характеристики двигателя. Эта форма зависит и от электромагнитных процессов в двигателе. Измененная форма располагается возможно ближе к нагрузочной характеристике и в идеале копирует ее. Это гарантирует, что система привода данной степени подвижности справится с воспроизведением заданного закона движения в переходном процессе, а установленная мощность двигателя будет минимально завышена при последующем ее расчете. Механическая характеристика привода на уровне вала двигателя зависит от передаточного числа редуктора при заданной нагрузочной характеристике на уровне шарнира и от потерь в редукторе.
в величине которого должна учитываться переменность конфигурации рабочего органа робота в переходном процессе, также принимался постоянным. Следовательно, обоснование формы механической характеристики привода, внутри которой располагается нагрузочная характеристика, по приведенным выше формулам является весьма приближенным. Строгий расчет моментов сил (или сил при поступательных движениях) как функций скоростей перемещения звеньев робота при заданных желаемых тахограммах может быть выполнен исходя из уравнения Лагранжа. Действие обратных связей по скорости и моменту силы, вводимых в систему привода для обеспечения требуемой стабильности скорости на одних участках механической характеристики системы и стабильности момента на других участках, изменяет форму механической характеристики двигателя. Эта форма зависит и от электромагнитных процессов в двигателе. Измененная форма располагается возможно ближе к нагрузочной характеристике и в идеале копирует ее. Это гарантирует, что система привода данной степени подвижности справится с воспроизведением заданного закона движения в переходном процессе, а установленная мощность двигателя будет минимально завышена при последующем ее расчете. Механическая характеристика привода на уровне вала двигателя зависит от передаточного числа редуктора при заданной нагрузочной характеристике на уровне шарнира и от потерь в редукторе.
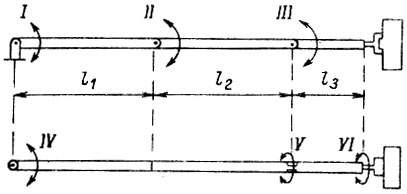
Рис. 25
Нагрузочные характеристики систем привода роботов имеют сложные формы. Рассмотрим, например, кинематическую схему манипулятора, изображенную на рис. 25. Первые три привода (I, II, III) осуществляют качание плечевого, локтевого и кистевого суставов в плоскости. Здесь применимы формулы моментов сил  3 (3), (4), (5), описывающие схему на рис. 7. Предположим, что оптимальной диаграммой скорости является диаграмма на рис. 24 а, а в соответствии с рис. 25 задано:
3 (3), (4), (5), описывающие схему на рис. 7. Предположим, что оптимальной диаграммой скорости является диаграмма на рис. 24 а, а в соответствии с рис. 25 задано: 
 Для вычислений по формулам (3), (4), (5) зададим
Для вычислений по формулам (3), (4), (5) зададим  (вместе с грузом).
(вместе с грузом).
Ускорения звеньев: в шарнире плеча  локтя
локтя  кисти
кисти 
Длительность переходного процесса

Здесь  - суммарное приращение угла
- суммарное приращение угла  за переходный процесс.
за переходный процесс.
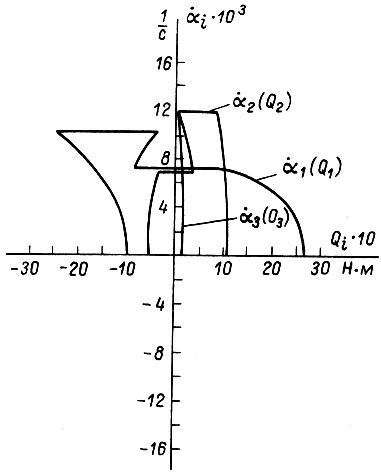
Рис. 26
На рис. 26, 27, 28 показаны рассчитанные нагрузочные характеристики трех систем привода (I, II, III)  причем углы
причем углы 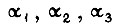 изменялись: для рис. 26 α1 от О до +90°, α2 от 0 до +75°, α3 от 0 до +60°; для рис. 27 α1 от 0 до +90°, α2 от 0 до +75°, α3 от 0 до -60°; для рис. 28 α1 от 0 до -90°, α2 от 0 до +75°, α3 от 0 до +60°. Ускорение силы тяжести принято равным нулю. Из графиков функций
изменялись: для рис. 26 α1 от О до +90°, α2 от 0 до +75°, α3 от 0 до +60°; для рис. 27 α1 от 0 до +90°, α2 от 0 до +75°, α3 от 0 до -60°; для рис. 28 α1 от 0 до -90°, α2 от 0 до +75°, α3 от 0 до +60°. Ускорение силы тяжести принято равным нулю. Из графиков функций 
 получаем, что максимальные скорости вращения в шарнирах манипулятора не превосходят 13*10-31/с, а моменты сил - 2,6 Н*м.
получаем, что максимальные скорости вращения в шарнирах манипулятора не превосходят 13*10-31/с, а моменты сил - 2,6 Н*м.
Приведем известные сведения о расчете мощности системы привода, построенной на основе электродвигателей. Выбор мощности электрической машины определяется ее нагревом, который лимитируется допустимой температурой изоляционных материалов. Допустимая температура соответствует принятому сроку службы изоляции. Различают следующие номинальные режимы работы двигателя.
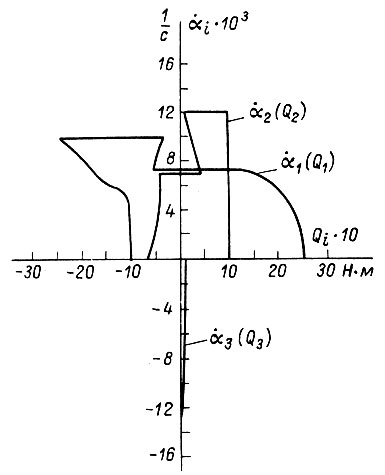
Рис. 27
Во-первых, продолжительный номинальный режим, который при неизменной нагрузке двигателя длится до тех пор, пока превышения температуры всех частей машины не достигнут установившихся значений. При этом допускают, что двигатель представляет собой однородное тело, имеющее бесконечную теплопроводность, и теплоотдача во внешнюю среду пропорциональна первой степени разности температур двигателя и охлаждающей среды. Температура охлаждающей среды принимается постоянной.
Рис. 28
Во-вторых, кратковременный режим работы, когда участок неизменной номинальной нагрузки чередуется с участком отключения двигателя. При нагрузке превышения температуры машины не достигают установившихся значений, а в отключенной состоянии все части ее охлаждаются до температуры окружающей среды.
В-третьих, повторно-кратковременный номинальный режим. В этом режиме чередующиеся рабочие участки с неизменной номинальной нагрузкой и участки отключения двигателя характеризуются такими длительностями, что превышения температуры частей машины не достигают установившихся значений. Продолжительность цикла работы двигателя при повторно-кратковременном режиме работы не превышает 10 мин (без учета влияния пусковых потерь). Данные три режима являются основными. В работе [33] указаны другие пять номинальных режимов работы электрической машины, учитывающие существенное влияние на нагрев пусков, реверсов, холостого хода и т. д.
Основным соотношением, соответствующим методу средних потерь, является соотношение

где  - средние потери в двигателе за цикл движения;
- средние потери в двигателе за цикл движения;  - номинальные потери;
- номинальные потери;  и
и  - длительность i-го участка цикла и потери мощности на этом участке.
- длительность i-го участка цикла и потери мощности на этом участке.
Выбрав некоторый цикл движений звеньев рабочего органа робота, при условии, что он повторяется вдоль всей оси времени, вычисляем по уравнению Лагранжа моменты сил в шарнирах, а также для системы привода одной степени подвижности среднюю мощность 
 где
где  - мощность на i-м интервале. Далее, умножив
- мощность на i-м интервале. Далее, умножив  на коэффициент запаса
на коэффициент запаса  получаем мощность, по которой выбираем двигатель. По кривой к.п.д; двигателя в функции нагрузки находим потери мощности для каждого участка движения, а затем средние потери за цикл. Правильность выбора двигателя проверяется неравенством
получаем мощность, по которой выбираем двигатель. По кривой к.п.д; двигателя в функции нагрузки находим потери мощности для каждого участка движения, а затем средние потери за цикл. Правильность выбора двигателя проверяется неравенством

где  - номинальные мощности и к.п.д. двигателя. Более упрощенно проверка по нагреву производится вычислением эквивалентного тока
- номинальные мощности и к.п.д. двигателя. Более упрощенно проверка по нагреву производится вычислением эквивалентного тока
где i(t) - ток в силовой обмотке двигателя; Iном - номинальный ток. Здесь пренебрегают переменностью потерь в стали и зависимостью механических потерь от нагрузки и полагают сопротивление в цепи обмотки постоянным. Если теплоотдача существенно зависит от скорости вращения, то в последнюю формулу вводятся корректирующие коэффициенты [33]. При расчете мощности двигателя, предназначенного для продолжительного режима работы, но используемого для повторно-кратковременной нагрузки, действует приближенное соотношение  где
где  - ток продолжительного режима;
- ток продолжительного режима;  - ток повторно-кратковременного режима; ε - отношение продолжительности рабочего участка к длительности цикла. Здесь пренебрегают постоянными потерями, а теплоотдача принимается одинаковой для любой скорости вращения. Выбор мощности двигателя, предназначенного для продолжительного режима, но используемого в кратковременном режиме работы, производится из соотношений
- ток повторно-кратковременного режима; ε - отношение продолжительности рабочего участка к длительности цикла. Здесь пренебрегают постоянными потерями, а теплоотдача принимается одинаковой для любой скорости вращения. Выбор мощности двигателя, предназначенного для продолжительного режима, но используемого в кратковременном режиме работы, производится из соотношений

где 

- длительность рабочего участка;  - среднее значение постоянной времени нагрева между значениями постоянных времени в начале и в конце процесса нагрева;
- среднее значение постоянной времени нагрева между значениями постоянных времени в начале и в конце процесса нагрева;  - мощности продолжительного и кратковременного режимов;
- мощности продолжительного и кратковременного режимов;  - допустимая перегрузочная способность двигателя.
- допустимая перегрузочная способность двигателя.
Для системы привода робота независимо от типов теплового режима, рассмотренных выше, нагрузка внутри рабочего участка цикла является переменной. Поэтому следует определять эквивалентные токи и мощности внутри цикла для продолжительного режима. Если реальны сформулированные выше повторно-кратковременный и кратковременный режимы, то эквивалентирование производится для них внутри рабочих участков цикла. Перемещение звеньев рабочего органа робота в пространстве и удержание их в покое благодаря действию следящих систем означает отсутствие участков отключений двигателей от источников питающих напряжений. Нагрузка систем привода в этом состоянии может быть соизмеримой и даже большей по сравнению с режимом движения. Поэтому основным тепловым режимом в этом случае является продолжительный режим. Кроме того, при выполнении роботом разнообразных операций один цикл нагрузки двигателей отличается от другого. В этом случае выбор мощности двигателей производят исходя из наиболее тяжелого цикла продолжительного режима работы.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'