Глава 2. Вопросы динамики систем электропривода
1. Функциональные схемы
На рис. 29 изображены функциональные схемы i-й системы привода с параллельной коррекцией. Здесь обозначено: 1 - элементы, преобразующие рассогласование  в сигналы, передаваемые по каналам управления; 2 - усилители мощности; 3 - силовые исполнительные элементы (силовой преобразователь и двигатель); 4, 8 - корректирующие звенья; 5 - кинематические цепи приводов, передающие движение к звену рабочего органа робота; 6 - датчики положения; 7, 10 - датчики сил; ИМ и ЗМ - исполнительный и задающий механизмы; 9 - вычислительное устройство; 11 - масштабирующий элемент.
в сигналы, передаваемые по каналам управления; 2 - усилители мощности; 3 - силовые исполнительные элементы (силовой преобразователь и двигатель); 4, 8 - корректирующие звенья; 5 - кинематические цепи приводов, передающие движение к звену рабочего органа робота; 6 - датчики положения; 7, 10 - датчики сил; ИМ и ЗМ - исполнительный и задающий механизмы; 9 - вычислительное устройство; 11 - масштабирующий элемент.
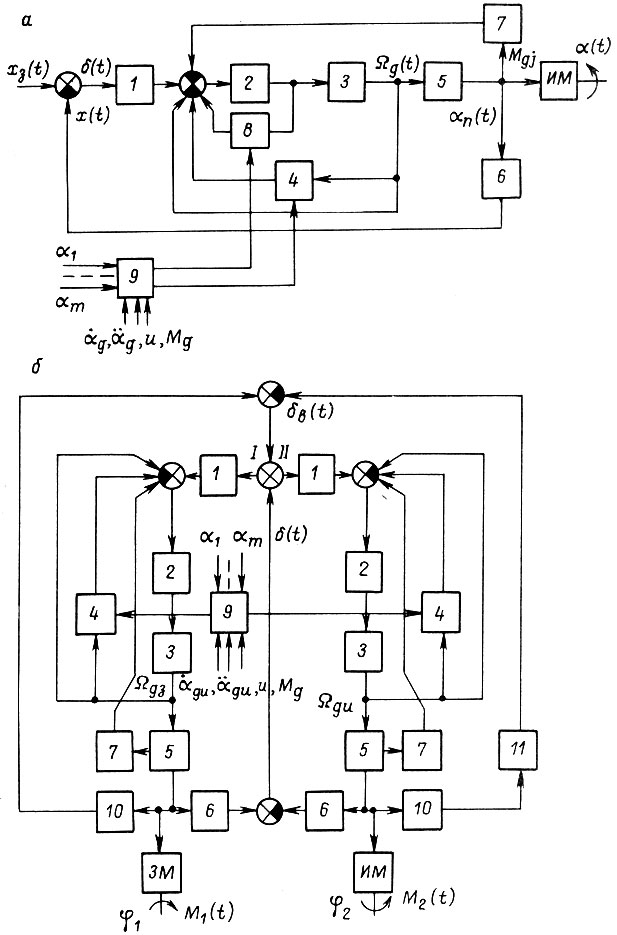
Рис. 29
Сигнал  в схеме на рис. 29 а поступает от блока программы. Схема, показанная на рис. 29 б, используется в копирующих манипуляторах. Оператор воздействует здесь моментом управления
в схеме на рис. 29 а поступает от блока программы. Схема, показанная на рис. 29 б, используется в копирующих манипуляторах. Оператор воздействует здесь моментом управления  на систему, представляющую собой сочетание двух взаимосвязанных следящих приводов. Информация о силах и перемещениях передается в любом направлении, и такую обратимую систему привода можно назвать симметричной. Упрощенной схемой является несимметричная, в которой сигнал рассогласования по пути подается только в канал управления II, а сигнал
на систему, представляющую собой сочетание двух взаимосвязанных следящих приводов. Информация о силах и перемещениях передается в любом направлении, и такую обратимую систему привода можно назвать симметричной. Упрощенной схемой является несимметричная, в которой сигнал рассогласования по пути подается только в канал управления II, а сигнал  характеризующий разность создаваемых усилий, поступает лишь в канал управления I. В этом случае параметры канала II не влияют на точность передачи сил, а параметры задающего канала практически не влияют на качество слежения по пути, однако такая система не имеет свойства полной обратимости.
характеризующий разность создаваемых усилий, поступает лишь в канал управления I. В этом случае параметры канала II не влияют на точность передачи сил, а параметры задающего канала практически не влияют на качество слежения по пути, однако такая система не имеет свойства полной обратимости.
Обратимая система привода небольшой мощности может быть выполнена на двухфазных асинхронных электродвигателях либо как система синхронной связи с использованием сельсинов. Если при этом в схеме отсутствует часть, с помощью которой отражаются усилия, то оператор вынужден преодолевать все статические и динамические нагрузки.
На схемах на рис. 29 показаны жесткие отрицательные обратные связи по скорости двигателя. Элементы 7 реализуют задержанную отрицательную связь по моменту, развиваемому двигателем. Устройство 9 вычисляет и устанавливает параметры корректирующих звеньев 4, 8 внутри каждого малого отрезка Δt, которым дискретизирована ось времени. На входы вычислительного устройства поступает информация об усредненных на Δt углах поворота звеньев рабочего органа  ускорении и скорости
ускорении и скорости  двигателя рассматриваемой степени свободы, о сигнале управления двигателем U. В приводе с электрическим двигателем переменного тока вместо и на вход устройства 9 поступает частота f. Из (10), (11), (12) для привода с электродвигателем постоянного тока независимого возбуждения, где
двигателя рассматриваемой степени свободы, о сигнале управления двигателем U. В приводе с электрическим двигателем переменного тока вместо и на вход устройства 9 поступает частота f. Из (10), (11), (12) для привода с электродвигателем постоянного тока независимого возбуждения, где 
 получаем уравнение относительно
получаем уравнение относительно 

На малом отрезке Δt принимаем

Тогда для суммарных приращений  за предыдущий переходный процесс, начиная от неподвижного состояния привода, имеем из (78) на отрезке Δt
за предыдущий переходный процесс, начиная от неподвижного состояния привода, имеем из (78) на отрезке Δt

Согласно (79) приращение  действующее на отрезке Δt, можно эквивалентировать приращением коэффициента усиления k апериодического звена с передаточной функцией
действующее на отрезке Δt, можно эквивалентировать приращением коэффициента усиления k апериодического звена с передаточной функцией

где 
Такое эквивалентирование не упрощает расчета переходного процесса в данном звене. Действительно, надо отдельно найти  для управления
для управления  (причем внутри всего процесса
(причем внутри всего процесса  и
и  соответствующее возмущению
соответствующее возмущению  а затем их сложить. Это означает, что для всей замкнутой структуры i-го привода надо определить
а затем их сложить. Это означает, что для всей замкнутой структуры i-го привода надо определить  как реакцию на приращение задающего сигнала
как реакцию на приращение задающего сигнала  а затем
а затем  для возмущения
для возмущения  Но если стремиться на каждом отрезке времени Δt к одним и тем же динамическим свойствам привода, т. е. к одной и той же САР, то параметры выбранных линейных корректирующих звеньев можно устанавливать из данного условия внутри каждого Δt в функции измеренных
Но если стремиться на каждом отрезке времени Δt к одним и тем же динамическим свойствам привода, т. е. к одной и той же САР, то параметры выбранных линейных корректирующих звеньев можно устанавливать из данного условия внутри каждого Δt в функции измеренных  Таким образом, компенсируется влияние на синтезированный заранее переходный процесс, во-первых, нелинейности привода робота, связанной с непостоянством J, во-вторых, возмущения изменяющего k.
Таким образом, компенсируется влияние на синтезированный заранее переходный процесс, во-первых, нелинейности привода робота, связанной с непостоянством J, во-вторых, возмущения изменяющего k.
Одно из уравнений (6), (7), или (8) представляем в виде

На предыдущем малом отрезке времени  устройство 9 (рис. 29 а) вычисляет
устройство 9 (рис. 29 а) вычисляет  (при известной массе груза), а также
(при известной массе груза), а также  Датчики измеряют средние за Δt значения
Датчики измеряют средние за Δt значения 
 и углов поворота звеньев робота. Это дает возможность вычислить в конце величину
и углов поворота звеньев робота. Это дает возможность вычислить в конце величину  В начале следующего отрезка
В начале следующего отрезка  параметры корректирующих звеньев в данной системе привода устанавливаются в функции
параметры корректирующих звеньев в данной системе привода устанавливаются в функции  уравнения (80), измеренных внутри . Аналогично информация на отрезке используется затем для управления внутри
уравнения (80), измеренных внутри . Аналогично информация на отрезке используется затем для управления внутри 
Более просто решается задача коррекции параметров корректирующих звеньев на каждом отрезке Δt, если с помощью датчика или вычислительного устройства определяется момент силы в шарнире. Тогда при любой массе груза коррекция вводится в функции этого момента, а момент инерции выходного вала привода считается неизменным и равным  . Структура корректирующих звеньев должна обеспечивать отсутствие ступенчатых приращений движущих моментов сил после коррекции параметров.
. Структура корректирующих звеньев должна обеспечивать отсутствие ступенчатых приращений движущих моментов сил после коррекции параметров.
Для привода с асинхронным электродвигателем уравнения типа (80) и (81) получаем, воспользовавшись выражениями (6) - (8), (55), (63). При наличии обратной связи по скорости исходим из уравнений (59), (68). За входной сигнал двигателя здесь принимается частота f.
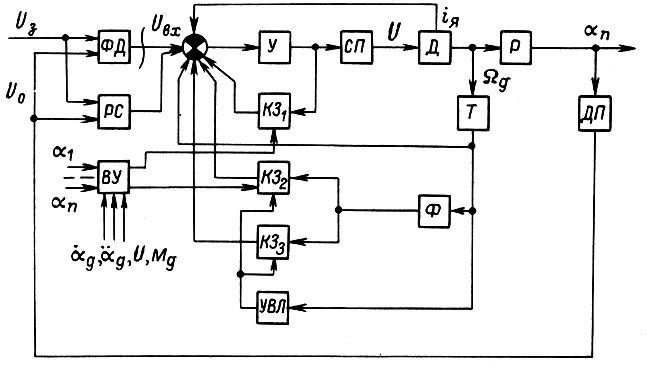
Рис. 30
На рис. 30 показана схема привода с фазовым управлением для одной степени свободы. Здесь Д - двигатель, Р - редуктор, СП - силовой преобразователь, У - усилитель мощности, Т - тахогенератор, ДП - датчик положения, ФД - фазовый детектор, PC -реле синхронизации, КЗ - корректирующие звенья, Ф - фильтр, УВЛ - узел выборки люфта, ВУ - вычислительное устройство.
Разбаланс по фазе  синусоидальных сигналов
синусоидальных сигналов  преобразуется схемой ФД в величину сигнала, поступающего на вход y. Если
преобразуется схемой ФД в величину сигнала, поступающего на вход y. Если  то вступает в действие PC, сигнал выхода которого приводит к максимальной скорости вращения двигателя. При пуске привода УВЛ включает звено
то вступает в действие PC, сигнал выхода которого приводит к максимальной скорости вращения двигателя. При пуске привода УВЛ включает звено  реализующее жесткую отрицательную связь по скорости. После быстрого прохождения механического люфта УВЛ заменяет жесткую связь по скорости на гибкую
реализующее жесткую отрицательную связь по скорости. После быстрого прохождения механического люфта УВЛ заменяет жесткую связь по скорости на гибкую  соответствующую желаемому качеству движения системы в динамике.
соответствующую желаемому качеству движения системы в динамике.
Схемы на рис. 29 а, 30 анализируются методами, известными в теории автоматического регулирования.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'