6. Цифровые следящие системы
На рис. 43 изображена функциональная схема следящей системы с электродвигателем постоянного тока. На ней обозначены: ШИП - широтно-импульсный преобразователь на транзисторах; Д - двигатель; ДП - датчик пути, в качестве которого использован вращающийся потенциометр; Р - редуктор; ЛС - логическая схема; П1 - преобразователь аналог-код угла поворота выходного вала привода  ; П2 - устройство запоминания углов
; П2 - устройство запоминания углов 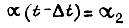 и
и  ; П3 - преобразователь величины тока
; П3 - преобразователь величины тока  в якоре электродвигателя в двоичный код;
в якоре электродвигателя в двоичный код;  - мультивибраторы;
- мультивибраторы;  - коммутатор, дискретизирующий ось времени равными отрезками длительностью
- коммутатор, дискретизирующий ось времени равными отрезками длительностью 
 - заданный угол поворота вала привода и
- заданный угол поворота вала привода и  - скорость изменения в коде.
- скорость изменения в коде.
Рис. 43
Сигналами выходов коммутатора в определенной последовательности внутри отрезков  подключаются к входу ЛС сигналы о,
подключаются к входу ЛС сигналы о,  В виде параллельных кодов. Цикл подключения сигналов к входу ЛС состоит из шести тактов, т. е. из шести отрезков времени длительностью . Логическая схема (ЛС) состоит из вычитателя двух сигналов, представленных в виде параллельных кодов, и схемы преобразования полученной разности в ширину импульсов напряжения на якоре электродвигателя. В первом такте ко входам вычитателя подаются сигналы
В виде параллельных кодов. Цикл подключения сигналов к входу ЛС состоит из шести тактов, т. е. из шести отрезков времени длительностью . Логическая схема (ЛС) состоит из вычитателя двух сигналов, представленных в виде параллельных кодов, и схемы преобразования полученной разности в ширину импульсов напряжения на якоре электродвигателя. В первом такте ко входам вычитателя подаются сигналы  во втором такте - те же сигналы, в третьем -
во втором такте - те же сигналы, в третьем -  в четвертом - сигнал, пропорциональный току якоря , в пятом -
в четвертом - сигнал, пропорциональный току якоря , в пятом -  в шестом -
в шестом -  В каждом такте получаем определенную длительность импульса напряжения на якоре двигателя в зависимости от величин сигналов, поступивших к входу ЛС. В логической схеме обеспечивается, кроме того, требуемая полярность напряжения на якоре в текущий момент времени в соответствии с алгоритмом управления. Длительность такте равна
В каждом такте получаем определенную длительность импульса напряжения на якоре двигателя в зависимости от величин сигналов, поступивших к входу ЛС. В логической схеме обеспечивается, кроме того, требуемая полярность напряжения на якоре в текущий момент времени в соответствии с алгоритмом управления. Длительность такте равна  где
где  - частота следования импульсов с выхода коммутатора. На другой вход ЛС поступают импульсы высокой частоты
- частота следования импульсов с выхода коммутатора. На другой вход ЛС поступают импульсы высокой частоты


Это позволяет определить, от какого из мультивибраторов отбираются импульсы в рассматриваемом такте для управления ЛС. Частота колебаний каждого мультивибратора в общем случае может иметь два значения. При большом рассогласовании в системе  устанавливаются одни частоты мультивибраторов, в малой же зоне - другие. Этим определяются различные коэффициенты передачи по каналам
устанавливаются одни частоты мультивибраторов, в малой же зоне - другие. Этим определяются различные коэффициенты передачи по каналам  так как импульсы высокой частоты
так как импульсы высокой частоты  , поступающие на вход ЛС, используются для считывания параллельных кодов, т. е. для преобразования их в ширину импульсов напряжения на якоре электродвигателя.
, поступающие на вход ЛС, используются для считывания параллельных кодов, т. е. для преобразования их в ширину импульсов напряжения на якоре электродвигателя.
При большой частоте переключения транзисторов широтно-импульсного преобразователя (порядка 1 кГц) дискретность управления в системе привода манипулятора можно не учитывать. Тогда, рассматривая ее как непрерывную и предполагая, что момент инерции вала привода, приведенный к электродвигателю  приходим к выводу, что структура следящей системы, соответствующая схеме на рис. 43, может быть синтезирована рассмотренным выше вариационным методом. Однако при этом надо создать связь по моменту силы в шарнире манипулятора, исключив обратную связь по току якоря. Уравнение объекта управления, которое используется при выводе
приходим к выводу, что структура следящей системы, соответствующая схеме на рис. 43, может быть синтезирована рассмотренным выше вариационным методом. Однако при этом надо создать связь по моменту силы в шарнире манипулятора, исключив обратную связь по току якоря. Уравнение объекта управления, которое используется при выводе  имеет второй порядок
имеет второй порядок

где  - конструктивный коэффициент двигателя; U - напряжение на якоре;
- конструктивный коэффициент двигателя; U - напряжение на якоре; 
Ниже рассмотрено соотношение между параметрами движения следящей системы, построенной в соответствии с функциональной схемой, изображенной на рис. 43, причем по сравнению со структурой, которую можно получить вариационным подходом, здесь действует обратная связь по току якоря двигателя. Ускорение вычисляется как вторая разность:

Связь по ускорению, реализуемая с помощью ЛС, создает управление, эквивалентное присутствию в системе статического контура регулирования ускорения вала привода. Это управление уменьшает влияние на процесс слежения переменности момента инерции.
Следящей системе, имеющей функциональную схему, показанную на рис. 43, и представленной как непрерывная система, соответствуют уравнения, описывающие ее движение без учета электромагнитных процессов в якорном контуре:

где  - угловая скорость вращения выходного вала привода в шарнире;
- угловая скорость вращения выходного вала привода в шарнире;  - ускорение вала;
- ускорение вала;  - сигнал задания, поступающий на вход эквивалентного контура регулирования ускорения;
- сигнал задания, поступающий на вход эквивалентного контура регулирования ускорения;  - сигнал по току в якоре электродвигателя, пропущенный через фильтр, который входит в преобразователь
- сигнал по току в якоре электродвигателя, пропущенный через фильтр, который входит в преобразователь 
 - сигнал на входе части схемы, преобразующей двоичный код в ширину импульсов напряжения на якоре (т. е. на входе собственной схемы управления широтно-импульсного преобразователя);
- сигнал на входе части схемы, преобразующей двоичный код в ширину импульсов напряжения на якоре (т. е. на входе собственной схемы управления широтно-импульсного преобразователя);  - среднее напряжение на якоре внутри цикла переключения транзисторов широтно-импульсного преобразователя, связь между напряжением и величиной выражается с помощью коэффициента схемы ШИП в виде
- среднее напряжение на якоре внутри цикла переключения транзисторов широтно-импульсного преобразователя, связь между напряжением и величиной выражается с помощью коэффициента схемы ШИП в виде 
 - активное сопротивление якорного контура. Вращающий момент
- активное сопротивление якорного контура. Вращающий момент  , равный моменту, развиваемому в шарнире (без учета сил трения), содержит три составляющие, в которые входят соответственно ускорение
, равный моменту, развиваемому в шарнире (без учета сил трения), содержит три составляющие, в которые входят соответственно ускорение  , скорость
, скорость  и величина
и величина  , имеющая размерность момента силы. Коэффициенты
, имеющая размерность момента силы. Коэффициенты  и момент являются функциями углов поворота и скоростей звеньев манипулятора и могут быть вычислены для каждый его конфигурации из уравнения Лагранжа, записанного для конкретной кинематической схемы. Кроме того, для рассматриваемой степени подвижности
и момент являются функциями углов поворота и скоростей звеньев манипулятора и могут быть вычислены для каждый его конфигурации из уравнения Лагранжа, записанного для конкретной кинематической схемы. Кроме того, для рассматриваемой степени подвижности 
 зависят и от ускорений других звеньев рабочего органа. В величине J учитывается также момент инерции электродвигателя и редуктора. Коэффициенты
зависят и от ускорений других звеньев рабочего органа. В величине J учитывается также момент инерции электродвигателя и редуктора. Коэффициенты  равны:
равны:  где
где  - конструктивный коэффициент электродвигателя,
- конструктивный коэффициент электродвигателя,  - передаточное число редуктора. Коэффициенты
- передаточное число редуктора. Коэффициенты  - постоянные.
- постоянные.
Задание на ускорение  поступает на вход эквивалентного контура регулирования ускорения как сигнал, вычисленный во внешнем контуре структуры системы привода:
поступает на вход эквивалентного контура регулирования ускорения как сигнал, вычисленный во внешнем контуре структуры системы привода:

где  пропорциональна разности
пропорциональна разности 
Из записанной выше системы уравнений получаем формулу ускорения

Статическая ошибка контура регулирования ускорения

где

Пусть  т. е.
т. е.  Тогда статическая ошибка
Тогда статическая ошибка
Для максимального момента сопротивления
Отсюда находим 
Зная  максимальное и минимальное значения коэффициента
максимальное и минимальное значения коэффициента  , т. е.
, т. е.  а также выбрав необходимую статическую ошибку
а также выбрав необходимую статическую ошибку  находим требуемую величину коэффициента . Реализовав этот коэффициент в схеме привода, получаем уменьшенную чувствительность следящей системы к изменениям момента силы сопротивления и эквивалентного момента инерции вала привода, приведенного к шарниру, в смысле отклонения ускорения вала
находим требуемую величину коэффициента . Реализовав этот коэффициент в схеме привода, получаем уменьшенную чувствительность следящей системы к изменениям момента силы сопротивления и эквивалентного момента инерции вала привода, приведенного к шарниру, в смысле отклонения ускорения вала  от задания
от задания  . В формуле коэффициенты
. В формуле коэффициенты  в общем случае рассчитываются с учетом наличия двух зон в отработке приводом заданного угла поворота звена. В первой зоне, когда рассогласование
в общем случае рассчитываются с учетом наличия двух зон в отработке приводом заданного угла поворота звена. В первой зоне, когда рассогласование  велико, необходимо иметь повышенные значения , что соответствует быстрому перемещению вала во вторую зону. Во второй же требуется плавное и точное позиционирование. Быстродействие здесь является второстепенной характеристикой системы, а поэтому коэффициенты в формуле , должны быть выбраны из условия получения кривой переходного процесса
велико, необходимо иметь повышенные значения , что соответствует быстрому перемещению вала во вторую зону. Во второй же требуется плавное и точное позиционирование. Быстродействие здесь является второстепенной характеристикой системы, а поэтому коэффициенты в формуле , должны быть выбраны из условия получения кривой переходного процесса  экспоненциального типа. Статическая ошибка позиционирования определяется числом двоичных разрядов цифровой системы привода, погрешностями электронных цепей и коэффициентами передачи сигналов по отдельным каналам.
экспоненциального типа. Статическая ошибка позиционирования определяется числом двоичных разрядов цифровой системы привода, погрешностями электронных цепей и коэффициентами передачи сигналов по отдельным каналам.
Обозначим максимальное двоичное число, характеризующее угол поворота i-го звена манипулятора  и записываемое в первом счетчике во время измерения , через
и записываемое в первом счетчике во время измерения , через  . Оно соответствует изменению угла поворота: от
. Оно соответствует изменению угла поворота: от  Число разрядов счетчика
Число разрядов счетчика  Число, записываемое в первом счетчике при измерении любого значения угла . сохраняется неизменным на протяжении всего цикла работы следящей системы, т. е. цикла переключения транзисторов широтно-импульсного преобразователя. Длительность измерения угла, равного длительности одного из тактов цикла, обозначим через
Число, записываемое в первом счетчике при измерении любого значения угла . сохраняется неизменным на протяжении всего цикла работы следящей системы, т. е. цикла переключения транзисторов широтно-импульсного преобразователя. Длительность измерения угла, равного длительности одного из тактов цикла, обозначим через 
Если число, характеризующее  и записываемое во втором счетчике, обозначить через
и записываемое во втором счетчике, обозначить через  то скорость вращения звена манипулятора
то скорость вращения звена манипулятора  будет пропорциональна в каждом цикле работы системы числу
будет пропорциональна в каждом цикле работы системы числу  С учетом числа
С учетом числа  записываемого внутри цикла в третьем счетчике и характеризующего
записываемого внутри цикла в третьем счетчике и характеризующего  получаем, что ускорению
получаем, что ускорению  соответствует разность
соответствует разность  Скорость вращения звена
Скорость вращения звена  в цифровой системе равна
в цифровой системе равна  Опустим индекс
Опустим индекс  При
При  имеем приращение угла поворота за такт
имеем приращение угла поворота за такт  Очевидно, величине
Очевидно, величине  соответствует число
соответствует число

Отсюда находим коэффициент передачи измерителя скорости 

Коэффициент  численно равен коэффициенту
численно равен коэффициенту  , входящему в рассмотренную выше систему уравнений, описывающую движение привода.
, входящему в рассмотренную выше систему уравнений, описывающую движение привода.
Для максимального ускорения  получаем за такт переключения схемы привода
получаем за такт переключения схемы привода  приращение скорости
приращение скорости  Величине
Величине  соответствует число
соответствует число  равное
равное
Коэффициент передачи измерителя ускорения  равен
равен

Задав  получаем
получаем
Задав  получаем другую формулу для определения максимального числа, записываемого в первом счетчике
получаем другую формулу для определения максимального числа, записываемого в первом счетчике
Тогда  откуда
откуда
Если число разрядов каждого счетчика равно  Пусть
Пусть 
Получаем величину максимального числа, соответствующего 

Коэффициент передачи измерителя скорости
Максимальное число, соответствующее ускорению  равно
равно

Коэффициент передачи измерителя ускорения 

Требуемое значение коэффициента обратной связи по ускорению определяется исходя из желаемой статической ошибки эквивалентного контура регулирования ускорения. От коэффициентов  и
и  зависит форма кривой переходного процесса системы
зависит форма кривой переходного процесса системы  Сигнал
Сигнал  на входе части схемы, преобразующей двоичный код в ширину импульсов напряжения на якоре двигателя, с учетом формулы
на входе части схемы, преобразующей двоичный код в ширину импульсов напряжения на якоре двигателя, с учетом формулы  равен
равен

или
С учетом передаточных коэффициентов измерителей угла поворота вала привода, скорости и ускорения получаем
где  - десятичное число, соответствующее двоичному числу, характеризующему заданный угол поворота вала привода;
- десятичное число, соответствующее двоичному числу, характеризующему заданный угол поворота вала привода;  - число, характеризующее заданную скорость вращения вала;
- число, характеризующее заданную скорость вращения вала;  - число, соответствующее току в якоре двигателя, записываемое в двоичном коде в счетчике тока;
- число, соответствующее току в якоре двигателя, записываемое в двоичном коде в счетчике тока;  - коэффициент передачи измерителя тока
- коэффициент передачи измерителя тока 
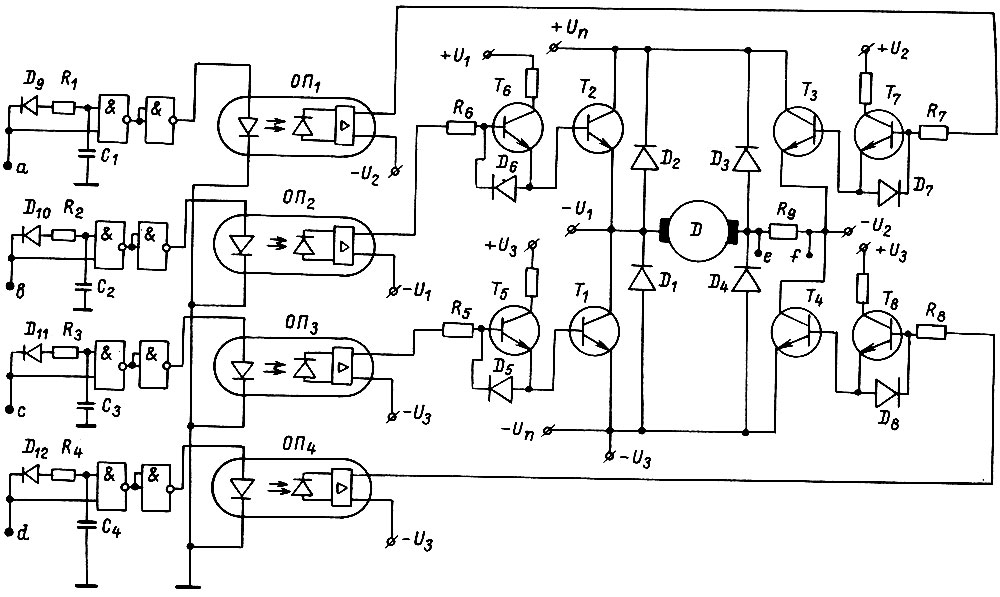
Рис. 44
На рис. 44 изображена схема силовой части исполнительной электромеханической системы манипулятора с входными цепями, обеспечивающими согласование и гальваническую развязку силовой части и логической схемы управления. Широтно-импульсное управление скоростью вращения электродвигателя обеспечивается изменением ширины импульса напряжения на якоре двигателя по сравнению с длительностью паузы путем регулирования длительностей включенного состояния составных транзисторов 
 Силовые диоды
Силовые диоды  обеспечивают защиту транзисторов
обеспечивают защиту транзисторов  от пробоя обратным напряжением при переключении плеч
от пробоя обратным напряжением при переключении плеч  либо
либо  а также при переключении на реверс. Диоды
а также при переключении на реверс. Диоды  обеспечивают более быстрое запирание транзисторов.
обеспечивают более быстрое запирание транзисторов.
При поступлении команды на вращение привода вперед запирается транзистор  отпирается
отпирается  в импульсе напряжения на якоре открыт
в импульсе напряжения на якоре открыт  и заперт
и заперт  а в паузе отперт и закрыт
а в паузе отперт и закрыт  . Команде на вращение назад соответствует режим отсечки и насыщения в импульсе открыт
. Команде на вращение назад соответствует режим отсечки и насыщения в импульсе открыт  и заперт
и заперт  В первом случае единичный потенциал имеется на входе
В первом случае единичный потенциал имеется на входе  , а нулевой - на входе
, а нулевой - на входе  во втором возбужден вход
во втором возбужден вход  на входе
на входе  - нуль. Оптроны
- нуль. Оптроны  осуществляют гальваническую развязку и работают в режиме "да-нет" Четыре цепочки с диодами
осуществляют гальваническую развязку и работают в режиме "да-нет" Четыре цепочки с диодами  резисторами
резисторами  конденсаторами
конденсаторами  и логическими элементами включенные перед входами оптронов,обеспечивают задержки во времени в передаче единичных потенциалов. Логические элементы являются двухвходовыми и реализуют функцию "И-НЕ".Питание логических элементов цепочек временной задержки осуществляется от того же источника, что и логической части следящей системы. Параллельно силовому источнику с напряжением
и логическими элементами включенные перед входами оптронов,обеспечивают задержки во времени в передаче единичных потенциалов. Логические элементы являются двухвходовыми и реализуют функцию "И-НЕ".Питание логических элементов цепочек временной задержки осуществляется от того же источника, что и логической части следящей системы. Параллельно силовому источнику с напряжением  включается емкость. Схема на рис. 44 предназначена для работы с частотой коммутации транзисторов, доходящей до
включается емкость. Схема на рис. 44 предназначена для работы с частотой коммутации транзисторов, доходящей до  Последовательно с обмоткой якоря включено сопротивление
Последовательно с обмоткой якоря включено сопротивление  - сопротивление шунта. С зажимов
- сопротивление шунта. С зажимов  снимается напряжение, пропорциональное току якоря двигателя, т. е. моменту вращения электродвигателя. Этот сигнал после усреднения используется при управлении двигателем.
снимается напряжение, пропорциональное току якоря двигателя, т. е. моменту вращения электродвигателя. Этот сигнал после усреднения используется при управлении двигателем.
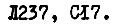
Рис. 45
На рис. 45 изображена схема преобразования аналогового сигнала, характеризующего угол поворота вала привода в цифровой код, и запоминания этого сигнала в моменты времени  и
и  В качестве датчика угла поворота использован потенциометр. Электрический потенциал, характеризующий этот угол, подается на вход
В качестве датчика угла поворота использован потенциометр. Электрический потенциал, характеризующий этот угол, подается на вход  Часть схемы, преобразующая величину
Часть схемы, преобразующая величину  в длительность импульса, разрешающего запись двоичного числа в счетчике на триггерах
в длительность импульса, разрешающего запись двоичного числа в счетчике на триггерах  собрана на усилителях
собрана на усилителях  триггерах
триггерах  и логических элементах
и логических элементах 
При поступлении единичного тактового импульса на вход 68 элемента 234 и нулевом состоянии неинверсного выхода триггера  возникает узкий импульс нулевого потенциала на входе триггера
возникает узкий импульс нулевого потенциала на входе триггера  благодаря действию цепочки из элементов
благодаря действию цепочки из элементов 
 После переключения возбуждается инверсный вход усилителя
После переключения возбуждается инверсный вход усилителя  Интегратор, построенный на усилителе
Интегратор, построенный на усилителе  резисторах
резисторах  конденсаторе
конденсаторе  находился в насыщении с положительным потенциалом выхода до переключения . Поэтому при появлении на его инверсном входе единичного (положительного) сигнала происходит переход от положительного напряжения на выходе
находился в насыщении с положительным потенциалом выхода до переключения . Поэтому при появлении на его инверсном входе единичного (положительного) сигнала происходит переход от положительного напряжения на выходе

к отрицательному. Сигнал выхода подается через резистор  на один из входов усилителя
на один из входов усилителя  . На этот вход через
. На этот вход через  поступает всегда положительный по полярности сигнал
поступает всегда положительный по полярности сигнал  с потенциометра, связанного с выходным валом привода. Третьим сигналом, подаваемым к входу через
с потенциометра, связанного с выходным валом привода. Третьим сигналом, подаваемым к входу через  являемся потенциал смещения, снимаемый с потенциометра
являемся потенциал смещения, снимаемый с потенциометра  До того момента времени,когда сумма трех потенциалов,управляющих , становятся равной нулю,на выходе имеем сигнал отрицательной полярности. После этого момента на входе элемента
До того момента времени,когда сумма трех потенциалов,управляющих , становятся равной нулю,на выходе имеем сигнал отрицательной полярности. После этого момента на входе элемента  появляется сигнал положительной полярности,а на выходе - нулевой сигнал,что приводит к переключению и . Интегратор с усилителем быстро переходит в исходное состояние, т. е. в состояние насыщения с положительным напряжением на выходе . На выходе элемента появляется единица. От переключившегося поступает нулевой потенциал инверсного выхода к нижнему входу элемента
появляется сигнал положительной полярности,а на выходе - нулевой сигнал,что приводит к переключению и . Интегратор с усилителем быстро переходит в исходное состояние, т. е. в состояние насыщения с положительным напряжением на выходе . На выходе элемента появляется единица. От переключившегося поступает нулевой потенциал инверсного выхода к нижнему входу элемента  . На выходе появляется единица. Рассмотренная часть схемы пришла в исходное состояние, за исключением . Установка в исходное состояние производится подачей нулевого потенциала на вход 64, снимаемого с выхода 64 схемы (см. рис. 48).
. На выходе появляется единица. Рассмотренная часть схемы пришла в исходное состояние, за исключением . Установка в исходное состояние производится подачей нулевого потенциала на вход 64, снимаемого с выхода 64 схемы (см. рис. 48).
Различным значениям сигнала , характеризующего угол поворота вала привода, соответствует разная длительность единичного состояния инверсного выхода , т. е. единичного состояния верхнего входа элемента  . На нижний вход этого элемента поступают импульсы постоянной частоты от мультивибратора, собранного на элементах
. На нижний вход этого элемента поступают импульсы постоянной частоты от мультивибратора, собранного на элементах  (рис. 46). Таким образом, число, записываемое в счетчике, собранному на триггерах
(рис. 46). Таким образом, число, записываемое в счетчике, собранному на триггерах  во время единичного состояния верхнего входа тем больше, чем больше потенциал .
во время единичного состояния верхнего входа тем больше, чем больше потенциал .
Рис. 46
На входы схемы, изображенной на рис. 45, поочередно поступают тактовые импульсы, обеспечивающие перезапись числа из счетчика, собранного на  в первую -
в первую - 
 а затем во вторую группу триггеров
а затем во вторую группу триггеров  Перезапись происходит в виде передачи параллельного кода. Последовательность переключения групп триггеров реализована следующим образом. После установки тактовым нулевым импульсом на входе 65 в исходное состояние
Перезапись происходит в виде передачи параллельного кода. Последовательность переключения групп триггеров реализована следующим образом. После установки тактовым нулевым импульсом на входе 65 в исходное состояние  поступает сигнал разрешения на запись двоичного числа в счетчике, соответствующего величине
поступает сигнал разрешения на запись двоичного числа в счетчике, соответствующего величине  Затем приходит нулевой тактовый импульс на вход 57, устанавливая в исходное состояние
Затем приходит нулевой тактовый импульс на вход 57, устанавливая в исходное состояние  Далее приходит единичный импульс на вход 60. Двоичное число переписывается из группы
Далее приходит единичный импульс на вход 60. Двоичное число переписывается из группы  в группу
в группу  Следующий затем во времени тактовый импульс (нулевой) приходит на вход 61. Этот импульс устанавливает в исходное состояние триггеры
Следующий затем во времени тактовый импульс (нулевой) приходит на вход 61. Этот импульс устанавливает в исходное состояние триггеры  Последующий единичный импульс появляется на входе 64. При этом двоичное число переписывается из счетчика с триггерами
Последующий единичный импульс появляется на входе 64. При этом двоичное число переписывается из счетчика с триггерами  в группу
в группу  На этом заканчивается цикл работы схемы, показанной на рис. 45. Для управления транзисторным широтно-импульсным преобразователем сигнал, характеризующий угол поворота вала привода
На этом заканчивается цикл работы схемы, показанной на рис. 45. Для управления транзисторным широтно-импульсным преобразователем сигнал, характеризующий угол поворота вала привода  снимается с зажимов
снимается с зажимов  сигнал 17-24 с зажимов 25-32, а сигнал
сигнал 17-24 с зажимов 25-32, а сигнал  - с зажимов 33-40.
- с зажимов 33-40.
Схема преобразователя величины тока якоря в двоичный код изображена на рис. 46. На вход  поступает сигнал, полученный преобразованием напряжения на шунте между точками
поступает сигнал, полученный преобразованием напряжения на шунте между точками  (ом. рис. 44) с помощью оптрона и сглаживающего фильтра. Сигнал усиливается с помощью усилителя
(ом. рис. 44) с помощью оптрона и сглаживающего фильтра. Сигнал усиливается с помощью усилителя  Далее преобразованный сигнал выпрямляется цепочкой, состоящей из усилителя
Далее преобразованный сигнал выпрямляется цепочкой, состоящей из усилителя  , резисторов
, резисторов 
 и диодов
и диодов  Выход соединен через резистор
Выход соединен через резистор  с инверсным входом усилителя
с инверсным входом усилителя  Часть схемы, состоящая из усилителей
Часть схемы, состоящая из усилителей  триггеров -
триггеров -  элементов
элементов 
 резисторов
резисторов 
 конденсаторов
конденсаторов  преобразует величину потенциала выхода усилителя в длительность единичного импульса на нижнем входе
преобразует величину потенциала выхода усилителя в длительность единичного импульса на нижнем входе  разрешающего заполнение счетчика на триггерах
разрешающего заполнение счетчика на триггерах  импульсами постоянной частоты. Эти импульсы поступают к входу счетчика с выхода элемента
импульсами постоянной частоты. Эти импульсы поступают к входу счетчика с выхода элемента  управляемого мультивибратором, построенным на элементах
управляемого мультивибратором, построенным на элементах  конденсаторе
конденсаторе  резисторах
резисторах 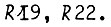 Преобразование потенциала выхода усилителя в число, записываемое в триггерах счетчика , производится так же, как и в схеме, изображенной на рис. 45, на элементах того же типа и с теми же номиналами. С помощью цепочки, состоящей из элементов
Преобразование потенциала выхода усилителя в число, записываемое в триггерах счетчика , производится так же, как и в схеме, изображенной на рис. 45, на элементах того же типа и с теми же номиналами. С помощью цепочки, состоящей из элементов  и
и  резисторов
резисторов  двуполярный потенциал выхода усилителя
двуполярный потенциал выхода усилителя  преобразуется в булев нуль или булеву единицу, появляющиеся на выходе 70. С этого выхода сигнал подается затем в схему управления широтно-импульсным преобразователем системы привода. Использование этого сигнала в целях управления скоростью вращения вала привода позволяет включать с правильной полярностью обратную связь по току якоря. При этом достигаются требуемая жесткость механической характеристики привода и некоторая компенсация влияния переменности момента инерции, приведенного к валу двигателя. Двоичное число, характеризующее медленно изменяющуюся составляющую тока якоря, снимается в схеме на рис. 46 для управления с зажимов 49-56.
преобразуется в булев нуль или булеву единицу, появляющиеся на выходе 70. С этого выхода сигнал подается затем в схему управления широтно-импульсным преобразователем системы привода. Использование этого сигнала в целях управления скоростью вращения вала привода позволяет включать с правильной полярностью обратную связь по току якоря. При этом достигаются требуемая жесткость механической характеристики привода и некоторая компенсация влияния переменности момента инерции, приведенного к валу двигателя. Двоичное число, характеризующее медленно изменяющуюся составляющую тока якоря, снимается в схеме на рис. 46 для управления с зажимов 49-56.
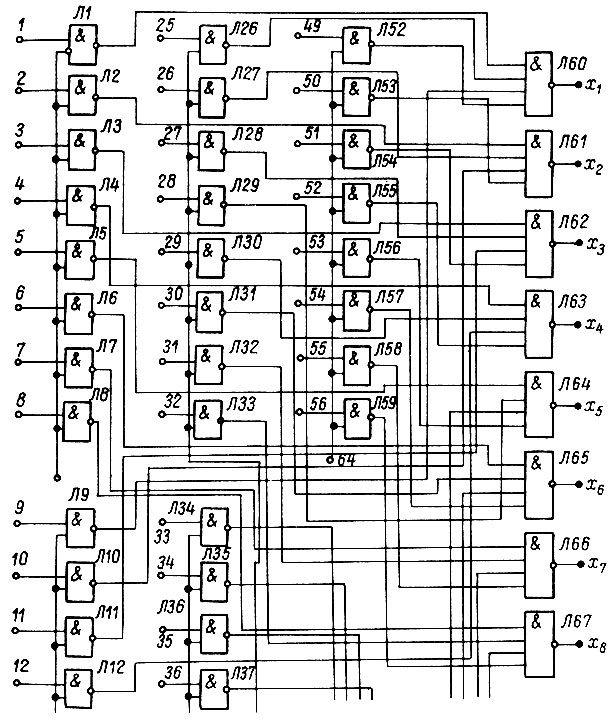
Рис. 47
Рис. 47. Продолжение
На рис. 47 изображена логическая схема, на входы которой поступают сигналы задания и сигналы обратных связей. Выходы схемы соединяются с входами логической схемы (рис. 48), непосредственно управляющей в каждый момент времени состоянием потенциалов точек  (см. рис. 44). На входы 1-8 (рис.47) подается от внешнего программоносителя двоичное число, характеризующее задание по углу поворота вала привода
(см. рис. 44). На входы 1-8 (рис.47) подается от внешнего программоносителя двоичное число, характеризующее задание по углу поворота вала привода  Аналогично на входах 9-16 присутствует сигнал
Аналогично на входах 9-16 присутствует сигнал  На входы 25-32 подается двоичное число, характеризующее угол поворота вала привода
На входы 25-32 подается двоичное число, характеризующее угол поворота вала привода  которое снимается с выходов 25-32 схемы, изображенной на рис.45. Число, подаваемое на входы 49-56, характеризует ток якоря двигателя. Эти входы соединяются с выходами 49-56 (см. рис. 46). Угол поворота вала
которое снимается с выходов 25-32 схемы, изображенной на рис.45. Число, подаваемое на входы 49-56, характеризует ток якоря двигателя. Эти входы соединяются с выходами 49-56 (см. рис. 46). Угол поворота вала  в виде двоичного числа поступает на входы 17-24. Такими же номерами обозначены выходы триггеров
в виде двоичного числа поступает на входы 17-24. Такими же номерами обозначены выходы триггеров 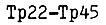 счетчика, изображенного на рис. 45. Входа 33-40 соединяются с выходами 33-40(см. рис. 45). Двоичное число на этих входах характеризует угол поворота вала привода
счетчика, изображенного на рис. 45. Входа 33-40 соединяются с выходами 33-40(см. рис. 45). Двоичное число на этих входах характеризует угол поворота вала привода  Элементы
Элементы  с входами 41-48 являются резервными.
с входами 41-48 являются резервными.
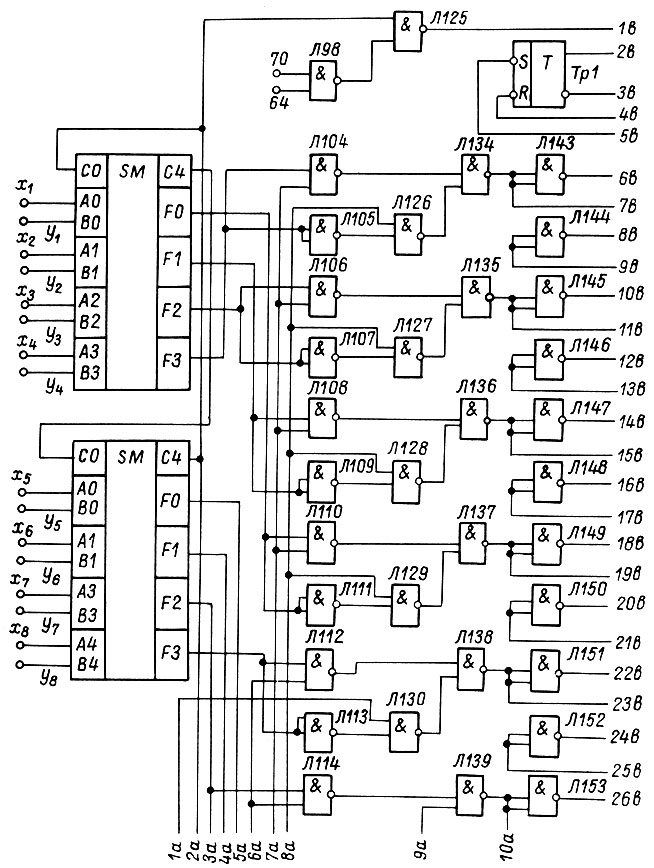
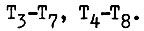
Рис. 48
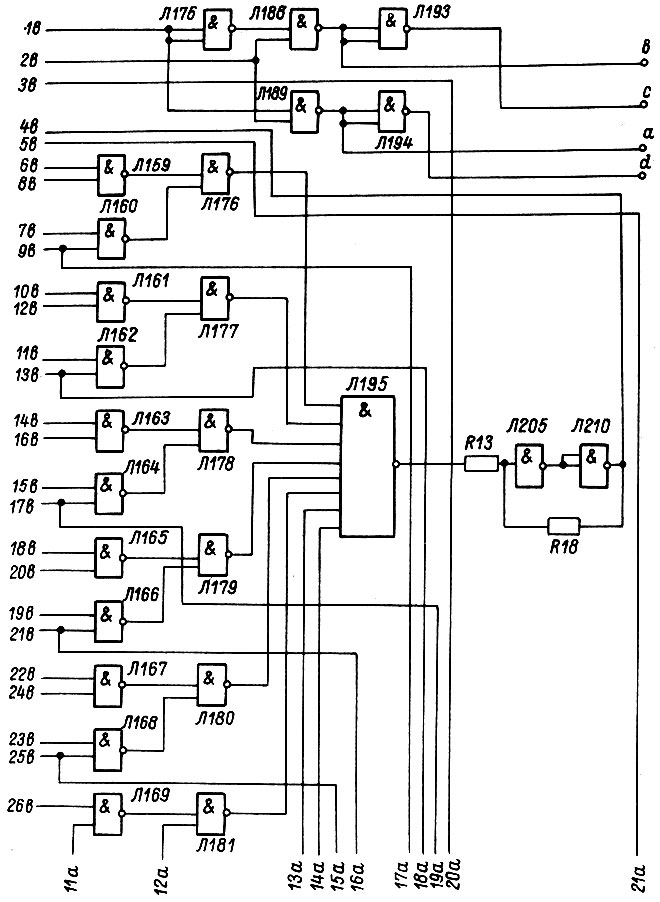
Рис. 48. Продолжение 1
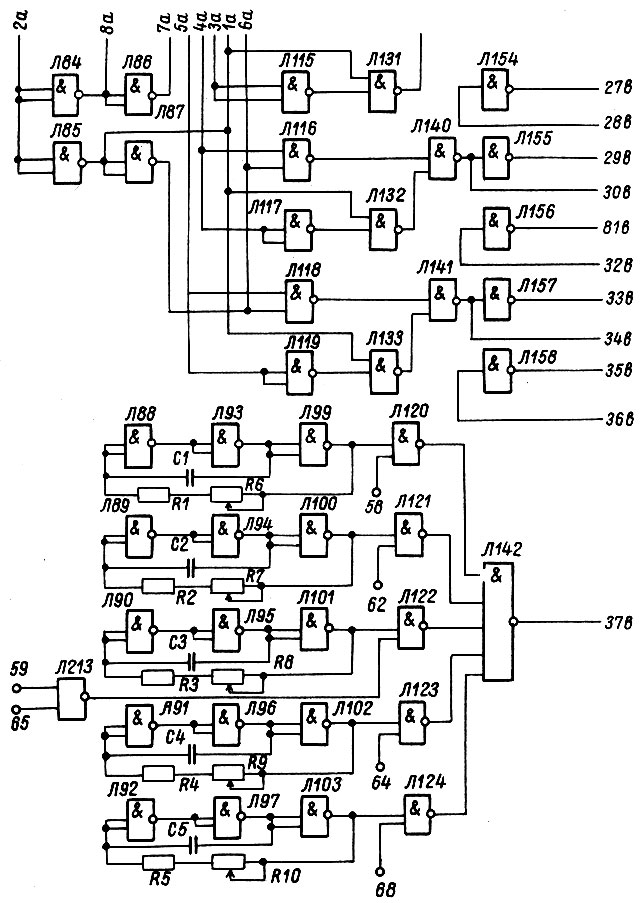
Рис. 48. Продолжение 2
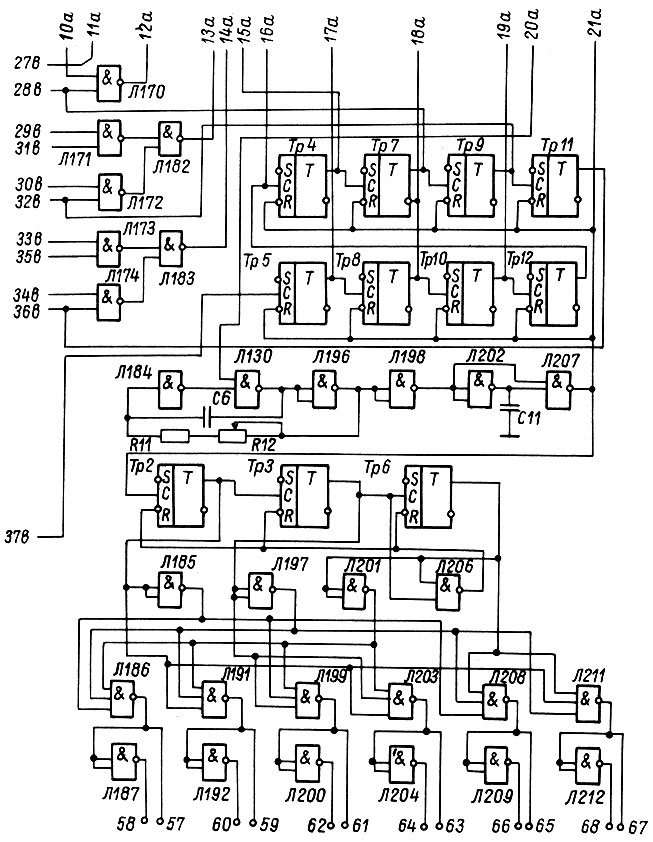
Рис. 48. Продолжение 3
Ниже приведена таблица, в которой показаны последовательность сброса (индекс c) и записи (индекс  ) показаний величины
) показаний величины  (ток якоря) и последовательность управления (индекс у ) схемой ШИП сигналами
(ток якоря) и последовательность управления (индекс у ) схемой ШИП сигналами  Цикл переключения в логической схеме следящей системы (см. рис. 47) состоит из шести временных тактов (табл. 2).
Цикл переключения в логической схеме следящей системы (см. рис. 47) состоит из шести временных тактов (табл. 2).
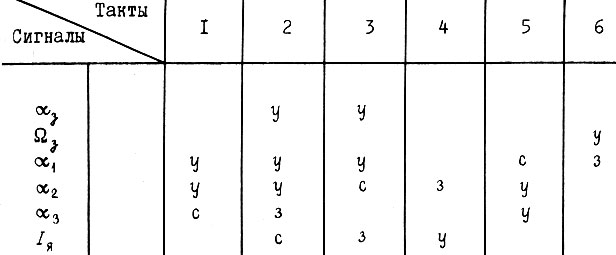
Таблица 2
Схема, изображенная на рис. 47, переключается в соответствии с табл. 2. В первом такте потенциал на входе 57 становится нулевым и возбуждаются выходы элементов  Сигналы выходов
Сигналы выходов  повторяют состояние входов 25-32, а сигналы на выходах
повторяют состояние входов 25-32, а сигналы на выходах  являются инверсными по отношению к соответствующим двоичным сигналам на входах 17-24.
являются инверсными по отношению к соответствующим двоичным сигналам на входах 17-24.
Итак, число  в прямом, а число
в прямом, а число  в обратном коде поступают в первом такте на входы сумматора (см. рис. 48). На выходе сумматора получаем число, равное разности
в обратном коде поступают в первом такте на входы сумматора (см. рис. 48). На выходе сумматора получаем число, равное разности  Этой разности пропорциональна длительность импульса напряжения на якоре двигателя в первом такте. Во втором такте на вход 59 схемы (ом. рис. 47) поступают нулевые значения двоичного сигнала и работа схемы происходит аналогично тому, как это было в первом такте. В третьем такте на входе 61 появляется нуль, а на входе 62 - единица. Сигналы выходов
Этой разности пропорциональна длительность импульса напряжения на якоре двигателя в первом такте. Во втором такте на вход 59 схемы (ом. рис. 47) поступают нулевые значения двоичного сигнала и работа схемы происходит аналогично тому, как это было в первом такте. В третьем такте на входе 61 появляется нуль, а на входе 62 - единица. Сигналы выходов  повторяют сигналы входов соответственно 1-8, а сигналы
повторяют сигналы входов соответственно 1-8, а сигналы  инверсны по отношению к сигналам на входах 17-24. На выходе сумматора (см. рис. 48) получаем разность
инверсны по отношению к сигналам на входах 17-24. На выходе сумматора (см. рис. 48) получаем разность  В четвертом такте возбужденным оказывается вход 64. На выходах получаем то же число, что и на входах 49-56. При этом возбуждены все выходы
В четвертом такте возбужденным оказывается вход 64. На выходах получаем то же число, что и на входах 49-56. При этом возбуждены все выходы  Число на выходе сумматора (см. рис. 48) повторяет число, характеризующее ток в якоре двигателя. В пятом такте вход 65 (см. рис. 47) оказывается нулевым, а вход 66 - единичным. На выходах получаем число
Число на выходе сумматора (см. рис. 48) повторяет число, характеризующее ток в якоре двигателя. В пятом такте вход 65 (см. рис. 47) оказывается нулевым, а вход 66 - единичным. На выходах получаем число  а на выходах
а на выходах  - число
- число  в обратном коде. На выходе сумматора (см. рис. 48) имеем разность
в обратном коде. На выходе сумматора (см. рис. 48) имеем разность  В шестом такте на входе 68 (см. рис. 47) появляется единица. На выходах получаем число
В шестом такте на входе 68 (см. рис. 47) появляется единица. На выходах получаем число  Все выходы
Все выходы  единичны. На выходе сумматора в схеме на рис. 48 появляется число, характеризующее скорость изменения задания по углу поворота вала. На этом цикл переключения логической схемы (см. рис. 47) заканчивается и начинается новый.
единичны. На выходе сумматора в схеме на рис. 48 появляется число, характеризующее скорость изменения задания по углу поворота вала. На этом цикл переключения логической схемы (см. рис. 47) заканчивается и начинается новый.
Схема, изображенная на рис. 48, содержит счетчик, собранный на триггерах  На вход первого разряда счетчика
На вход первого разряда счетчика  внутри каждого из рассмотренных выше тактов поступают импульсы высокой частоты с выхода элемента
внутри каждого из рассмотренных выше тактов поступают импульсы высокой частоты с выхода элемента  . Входы соединены с выходами пяти мультивибраторов. В каждом такте только один из мультивибраторов управляет элементом , в зависимости от того, какой из входов 58, 62, 64, 68 имеет единичный потенциал, либо какой из выходов 59, 65 имеет нулевой потенциал. В первом такте на выходе частота импульсов
. Входы соединены с выходами пяти мультивибраторов. В каждом такте только один из мультивибраторов управляет элементом , в зависимости от того, какой из входов 58, 62, 64, 68 имеет единичный потенциал, либо какой из выходов 59, 65 имеет нулевой потенциал. В первом такте на выходе частота импульсов  в третьем
в третьем  во втором и пятом тактах
во втором и пятом тактах  в четвертом -
в четвертом -  и в пятом такте
и в пятом такте 
Заполнение счетчика () начинается в каждом такте после того, как все триггеры установятся в нулевое состояние нулевым импульсом с выхода  После этого идет процесс сравнения двоичного числа на выходе сумматора и числа, возрастающего в счетчике на триггерах по мере поступления заполняющих импульсов от на вход
После этого идет процесс сравнения двоичного числа на выходе сумматора и числа, возрастающего в счетчике на триггерах по мере поступления заполняющих импульсов от на вход  Сравнение чисел производится с помощью логических цепей, собранных на элементах
Сравнение чисел производится с помощью логических цепей, собранных на элементах  В момент времени, когда сравниваемые числа становятся эквивалентными внутри очередного такта работы системы привода, на выходе элемента Л195 появляется нулевой сигнал. Этот сигнал через цепочку, собранную на элементах
В момент времени, когда сравниваемые числа становятся эквивалентными внутри очередного такта работы системы привода, на выходе элемента Л195 появляется нулевой сигнал. Этот сигнал через цепочку, собранную на элементах  о резисторами
о резисторами 
 управляет R-входом триггера
управляет R-входом триггера  Ранее триггер
Ранее триггер  был установлен в единичное состояние нулевым импульсом выхода элемента
был установлен в единичное состояние нулевым импульсом выхода элемента  а после появления нулевого потенциала на выходе
а после появления нулевого потенциала на выходе  триггер
триггер  переключается в нулевое состояние(состояние неинверсного выхода ). Таким образом,внутри такта работы системы привода длительность единичного импульса,снимаемого с неинверсного выхода пропорциональна двоичному числу на выходе сумматора. После того как триггер переключился в нулевое состояние появляется единичный сигнал на,его инверсном выходе,который поступает на вход элемента
переключается в нулевое состояние(состояние неинверсного выхода ). Таким образом,внутри такта работы системы привода длительность единичного импульса,снимаемого с неинверсного выхода пропорциональна двоичному числу на выходе сумматора. После того как триггер переключился в нулевое состояние появляется единичный сигнал на,его инверсном выходе,который поступает на вход элемента  При этом мультивибратор, собранный на элементах
При этом мультивибратор, собранный на элементах  конденсаторе
конденсаторе  резисторах
резисторах  растормаживается и выдает затем нулевой импульс на выходе
растормаживается и выдает затем нулевой импульс на выходе  т. е. появляется единичный сигнал на выходе
т. е. появляется единичный сигнал на выходе  и узкий нулевой импульс на выходе . Счетчик на триггерах устанавливается в исходное состояние, а триггер - в единичное. Мультивибратор
и узкий нулевой импульс на выходе . Счетчик на триггерах устанавливается в исходное состояние, а триггер - в единичное. Мультивибратор 
 затормаживается, начинается следующий такт работы системы привода, т. е. новый такт, в котором сравниваются числа на выходе сумматора и счетчика ().
затормаживается, начинается следующий такт работы системы привода, т. е. новый такт, в котором сравниваются числа на выходе сумматора и счетчика ().
Каждый раз, когда на выходе  появляется узкий нулевой импульс, происходит переключение счетчика, собранного на триггерах
появляется узкий нулевой импульс, происходит переключение счетчика, собранного на триггерах  Этот счетчик вследствие действия цепи обратной связи
Этот счетчик вследствие действия цепи обратной связи  работает по циклам, состоящим из шести тактов. Каждому такту соответствует появление нулевого сигнала на выходе одного из шести элементов:
работает по циклам, состоящим из шести тактов. Каждому такту соответствует появление нулевого сигнала на выходе одного из шести элементов: 
 При этом на выходе одного из элементов
При этом на выходе одного из элементов 
 появляется единица. Выход каждого из этих элементов возбуждается поочередно. Это соответствует смене тактов. В каждом следующем такте элементом
появляется единица. Выход каждого из этих элементов возбуждается поочередно. Это соответствует смене тактов. В каждом следующем такте элементом  управляет новый мультивибратор. Ширина единичного импульса на выходе
управляет новый мультивибратор. Ширина единичного импульса на выходе  обратно пропорциональна частоте мультивибратора, управляющего элементом в рассматриваемом такте. Настраивая мультивибраторы на разные частоты, получаем желаемые коэффициенты усиления сигналов задания и сигналов обратных связей системы привода,управляющих по очереди транзисторной схемой ШИП - двигатель. Выход триггера соединен с выходами элементов
обратно пропорциональна частоте мультивибратора, управляющего элементом в рассматриваемом такте. Настраивая мультивибраторы на разные частоты, получаем желаемые коэффициенты усиления сигналов задания и сигналов обратных связей системы привода,управляющих по очереди транзисторной схемой ШИП - двигатель. Выход триггера соединен с выходами элементов  Элементами
Элементами  (через
(через  и
и  а также
а также  управляют также элементы
управляют также элементы  Этим обеспечивается требуемая полярность включения якоря двигателя к источнику питания с напряжением
Этим обеспечивается требуемая полярность включения якоря двигателя к источнику питания с напряжением  На верхний вход
На верхний вход  поступает сигнал переноса в высшем разряде сумматора. При единичном значении этого сигнала выходной сигнал
поступает сигнал переноса в высшем разряде сумматора. При единичном значении этого сигнала выходной сигнал  является также единичным. В четвертом такте, когда на входе
является также единичным. В четвертом такте, когда на входе  появляется единица, на выходе получаем нуль, а на выходе - единицу, если полярности тока якоря двигателя (медленной составляющей тока) соответствует единичное значение потенциала на входе 70. Этот вход соединен с выходом 70 схемы, изображенной на рис. 46. При другой полярности тока на выходе появляется нуль. Тогда изменение состояния выходов
появляется единица, на выходе получаем нуль, а на выходе - единицу, если полярности тока якоря двигателя (медленной составляющей тока) соответствует единичное значение потенциала на входе 70. Этот вход соединен с выходом 70 схемы, изображенной на рис. 46. При другой полярности тока на выходе появляется нуль. Тогда изменение состояния выходов 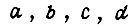 приводит к реверсу задания на скорость вращения вала, поступающего в схему ШИП - двигатель (схема на рис. 4).
приводит к реверсу задания на скорость вращения вала, поступающего в схему ШИП - двигатель (схема на рис. 4).
Разработка рассмотренной выше следящей системы представляет собой попытку создать цифровую систему привода манипулятора, в которой имела бы место некоторая удовлетворительная для практики компенсация переменности момента инерции механизма, приведенного к валу двигателя и момента сопротивления. Реализация этой системы связана с высококачественным выполнением монтажа, тонкой настройкой и трудоемкой работой по выявлению причин, сбивающих работу логических цепей, и с их устранением. Поэтому разработанный алгоритм управления в следящей системе целесообразно реализовать с применением готовых и надежных микропроцессорных устройств.
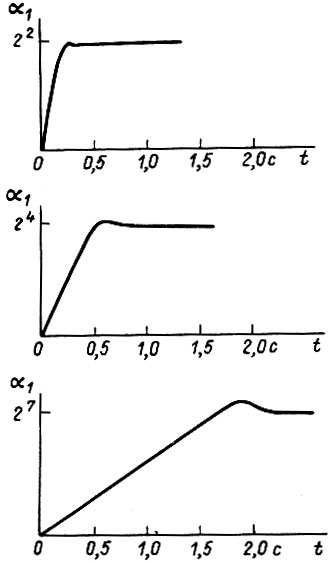
Рис. 49
На рис. 49 показан вид переходных процессов следящей системы, в которой в качестве датчика угла поворота вала привода использован вращающийся потенциометр типа СПЧ-8, установленный на выходном валу редуктора (передаточное число  Скорость двигателя
Скорость двигателя 
Следует отметить, что на динамические свойства следящей системы существенное влияние оказывает варьирование коэффициентов передачи в цепи обратной связи по углу 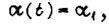 по скорости вращения и по току якоря изменением частот соответствующих мультивибраторов (первый, второй и четвертый такты). В значительно меньшей степени оказывает влияние на перерегулирование и длительность переходного процесса варьирование коэффициентом передачи в цепи обратной связи по ускорению вала (по второй разности углов). Это показывает, что необходимо иметь также высокоскоростной датчик пути в исполнительной системе робота.
по скорости вращения и по току якоря изменением частот соответствующих мультивибраторов (первый, второй и четвертый такты). В значительно меньшей степени оказывает влияние на перерегулирование и длительность переходного процесса варьирование коэффициентом передачи в цепи обратной связи по ускорению вала (по второй разности углов). Это показывает, что необходимо иметь также высокоскоростной датчик пути в исполнительной системе робота.
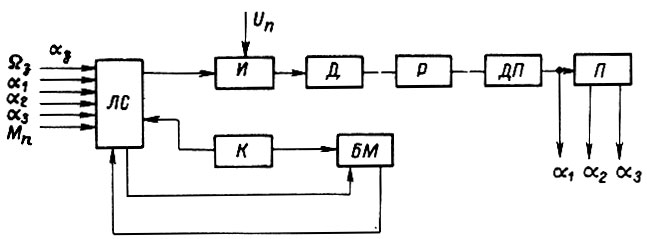
Рис. 50
На рис. 50 показано общее построение системы привода с электродвигателями переменного тока. Здесь обозначено:  - инвертор,
- инвертор,  - двигатель,
- двигатель,  - редуктор,
- редуктор,  - датчик пути,
- датчик пути,  - устройство запоминания углов
- устройство запоминания углов 
 - коммутатор,
- коммутатор,  - блок мультивибраторов,
- блок мультивибраторов,  - логическая схема. На вход в двоичном коде поступает информация об
- логическая схема. На вход в двоичном коде поступает информация об 
 и моменте вращения вала привода
и моменте вращения вала привода  Назначение ДП, П, K, БМ то же, что и в схеме, изображенной на рис. 43. В схеме реализуется широтно-синусная модуляция импульсов управления транзисторами инвертора. В зависимости от величины разбаланса
Назначение ДП, П, K, БМ то же, что и в схеме, изображенной на рис. 43. В схеме реализуется широтно-синусная модуляция импульсов управления транзисторами инвертора. В зависимости от величины разбаланса  и разбаланса по скорости
и разбаланса по скорости  изменяется период следования этих импульсов. Их длительность характеризует напряжение на обмотке статора двигателя. С помощью алгоритма работы можно осуществить частотный и частотно-токовый принципы управления в приводе переменного тока. Информация о моменте
изменяется период следования этих импульсов. Их длительность характеризует напряжение на обмотке статора двигателя. С помощью алгоритма работы можно осуществить частотный и частотно-токовый принципы управления в приводе переменного тока. Информация о моменте  (либо о токе) в исполнительной системе робота должна поступать чаще, чем информация об
(либо о токе) в исполнительной системе робота должна поступать чаще, чем информация об  Это же соображение относится и к информации об ускорении вала привода.
Это же соображение относится и к информации об ускорении вала привода.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'