3. Электрогидравлические следящие системы с объемным управлением
В электрогидравлических системах этого класса используются гидравлические исполнительные механизмы с объемным управлением, состоящие из реверсивного насоса переменной производительности, гидромотора и соединительных трубопроводов между ними. Рабочие процессы, протекающие в исполнительных механизмах объемного управления, определяются уравнением расхода и уравнением моментов (сил), действующих на выходной вал гидродвигателя. Уравнение расхода

где  - подача насоса при холостом ходе и заданном значении сигнала управления
- подача насоса при холостом ходе и заданном значении сигнала управления  - наибольшая подача насоса при холостом ходе,
- наибольшая подача насоса при холостом ходе,  - удельный объем насоса (объем жидкости, проходящей через насос при повороте его вала на один радиан, при отсутствии утечек и сигнале управления
- удельный объем насоса (объем жидкости, проходящей через насос при повороте его вала на один радиан, при отсутствии утечек и сигнале управления  - угловая скорость насоса;
- угловая скорость насоса;  - удельный объем гидромотора;
- удельный объем гидромотора;  - угловая скорость гидромотора;
- угловая скорость гидромотора;  - расход утечек;
- расход утечек;  - расход жидкости, обусловленный деформацией жидкости и податливостью трубопроводов. Расход утечек пропорционален перепаду давления
- расход жидкости, обусловленный деформацией жидкости и податливостью трубопроводов. Расход утечек пропорционален перепаду давления  на гидродвигателе:
на гидродвигателе:
где τ характеризует герметичность.
Расход , обусловленный деформацией и податливостью трубопровода, есть
где v характеризует упругость исполнительного механизма. Тогда

где  При
При  действительная подача отличается от данной подачи . Это отличие учитываем коэффициентом ξ в формуле , т. е.
действительная подача отличается от данной подачи . Это отличие учитываем коэффициентом ξ в формуле , т. е.

Уравнение равновесия моментов сил на валу гидромотора

где  - вращающий момент, уравновешивающий момент силы в шарнире рабочего органа робота и динамическую составляющую;
- вращающий момент, уравновешивающий момент силы в шарнире рабочего органа робота и динамическую составляющую;  - момент нелинейного демпфирования;
- момент нелинейного демпфирования;  - коэффициент вязкого демпфирования. В приближенных расчетах
- коэффициент вязкого демпфирования. В приближенных расчетах

где c - коэффициент потерь, устанавливаемый из опыта для каждой конструкции гидропривода.
Исключая из уравнений (163) и (164) перепад давлений , можно получить дифференциальное уравнение, описывающее динамику привода.
Исполнительный механизм обеспечивает определенный диапазон регулирования скорости  Поскольку
Поскольку  определяется возможностями конструкции механизма, а диапазон
определяется возможностями конструкции механизма, а диапазон  задан, то необходимо иметь определенное значение
задан, то необходимо иметь определенное значение  - минимальной по величине устойчивой скорости, В исполнительном механизме всегда существует наименьшая устойчивая скорость
- минимальной по величине устойчивой скорости, В исполнительном механизме всегда существует наименьшая устойчивая скорость  , значение которой определяется нагрузкой и нелинейными свойствами механизма (наличием "отрицательного сопротивления"). Величина возрастает с уменьшением инерционной нагрузки и размеров гидравлического исполнительного механизма.
, значение которой определяется нагрузкой и нелинейными свойствами механизма (наличием "отрицательного сопротивления"). Величина возрастает с уменьшением инерционной нагрузки и размеров гидравлического исполнительного механизма.
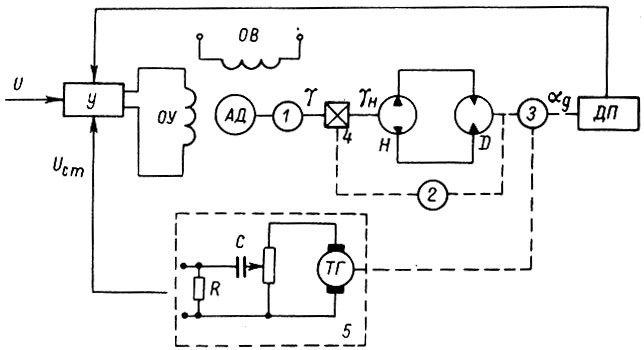
Рис. 57
На рис. 57 изображена схема электрогидравлической следящей системы, в которой управление производительностью насоса осуществляется асинхронным электродвигателем АД [28]. Электрическое напряжение  характеризующее разность между заданием по пути и действительным углом поворота вала гидропривода, поступает на вход усилителя
характеризующее разность между заданием по пути и действительным углом поворота вала гидропривода, поступает на вход усилителя  . Усилитель управляет величиной тока в обмотке
. Усилитель управляет величиной тока в обмотке  асинхронного электродвигателя. Напряжение на обмотке обозначим через
асинхронного электродвигателя. Напряжение на обмотке обозначим через  . Выходной вал АД через редуктор и дифференциал 4 связан с механизмом изменения производительности насоса
. Выходной вал АД через редуктор и дифференциал 4 связан с механизмом изменения производительности насоса  Изменение производительности приводит к изменению скорости вращения гидродвигателя
Изменение производительности приводит к изменению скорости вращения гидродвигателя 
В схеме применена внутренняя отрицательная обратная связь через редуктор 2 по углу поворота вала гидродвигателя. Рассмотрим сначала следящую систему без введения в нее корректирующей обратной связи, обеспечиваемой устройством 5 . Напряжение на обмотке электродвигателя  где
где  - коэффициент передачи усилителя.
- коэффициент передачи усилителя.
Зависимость вращающего момента электродвигателя от его скорости запишем в виде  где
где  - скорость вращения;
- скорость вращения;  Тогда дифференциальное уравнение, записанное относительно угла поворота на выходном валу редуктора, можно представить в виде
Тогда дифференциальное уравнение, записанное относительно угла поворота на выходном валу редуктора, можно представить в виде

где  Здесь принято, что вращающий момент электродвигателя уравновешен только динамической составляющей
Здесь принято, что вращающий момент электродвигателя уравновешен только динамической составляющей  где
где  - момент инерции, приведенный к валу с углом поворота
- момент инерции, приведенный к валу с углом поворота  - вторая производная от γ по времени. Передаточную функцию управляющего устройства механизма изменения производительности насоса
- вторая производная от γ по времени. Передаточную функцию управляющего устройства механизма изменения производительности насоса  получаем из (166):
получаем из (166):

В наиболее простом виде, пренебрегая утечками, производительность насоса представляем пропорциональной углу поворота  где
где  - коэффициент усиления насоса по расходу. Полагая равными нулю коэффициенты
- коэффициент усиления насоса по расходу. Полагая равными нулю коэффициенты  приходим к формуле скорости гидродвигателя
приходим к формуле скорости гидродвигателя
где  - коэффициент усиления гидропривода по скорости.
- коэффициент усиления гидропривода по скорости.
Передаточная функция системы насос - гидродвигатель:

Передаточная функция внутреннего контура с механической обратной связью через редуктор 2

Здесь  - коэффициент обратной связи.
- коэффициент обратной связи.
Передаточная функция разомкнутой по углу  системы
системы

где  - произведение коэффициентов передачи звеньев структурной схемы системы, разомкнутой по ;
- произведение коэффициентов передачи звеньев структурной схемы системы, разомкнутой по ;  - постоянная, определяемая из (169) после подстановки (168); напряжение
- постоянная, определяемая из (169) после подстановки (168); напряжение  пропорциональное разности угла задания
пропорциональное разности угла задания  и угла в рассматриваемом случае, есть
и угла в рассматриваемом случае, есть 
Передаточная функция замкнутой системы

Учтем действие устройства коррекции 5 (см. схему на рис. 57). Передаточная функция этого устройства описывает звено гибкой связи по углу поворота :
Здесь  - коэффициент, учитывающий передаточные свойства тахогенератора и дифференцирующей электрической цепочки, имеющей постоянную времени
- коэффициент, учитывающий передаточные свойства тахогенератора и дифференцирующей электрической цепочки, имеющей постоянную времени  Передаточная функция замкнутой системы
Передаточная функция замкнутой системы

Заменив в (171) s на  , можем выделить действительную часть частотной характеристики
, можем выделить действительную часть частотной характеристики  Затем по формуле (93) в общем виде находим реакцию электрогидравлической следящей системы на появление ступенчатого входного воздействия. Для желаемой формы этой реакции подбираем значения
Затем по формуле (93) в общем виде находим реакцию электрогидравлической следящей системы на появление ступенчатого входного воздействия. Для желаемой формы этой реакции подбираем значения  Внутри каждого малого отрезка времени
Внутри каждого малого отрезка времени  добавочное устройство корректирует параметры
добавочное устройство корректирует параметры  из условия сохранения одних и тех же динамических свойств электрогидравлического привода. То же самое может быть достигнуто в процессе выработки желаемых сигналов управления, поступающих к входу усилителя в схеме на рис. 57 от микропроцессора. В этом варианте отсутствует корректирующее устройство 5, его действие учитывается в вычислительном алгоритме микропроцессора. Соображения о применимости вариационного метода к синтезу управлений и о построении системы привода с контуром регулирования ускорения, высказанные выше для электрогидравлической следящей системы с дроссельным управлением, остаются теми же и для системы с объемным управлением.
из условия сохранения одних и тех же динамических свойств электрогидравлического привода. То же самое может быть достигнуто в процессе выработки желаемых сигналов управления, поступающих к входу усилителя в схеме на рис. 57 от микропроцессора. В этом варианте отсутствует корректирующее устройство 5, его действие учитывается в вычислительном алгоритме микропроцессора. Соображения о применимости вариационного метода к синтезу управлений и о построении системы привода с контуром регулирования ускорения, высказанные выше для электрогидравлической следящей системы с дроссельным управлением, остаются теми же и для системы с объемным управлением.
Заметим, что гидропривод с объемным управлением используется в технике реже, чем с дроссельным. Однако, благодаря высокому коэффициенту полезного действия, он получает все большее распространение. Применение электрогидравлических следящих систем с объемным управлением целесообразно для случая больших выходных мощностей (более 5 кВт).
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'