Глава 4. Обучение и адаптация в системе привода
1. Сущность обучения
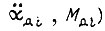
На рис. 58а показана схема, с помощью которой производится первый вид обучения робота движению по i-й степени свободы. Здесь обозначено: ИС - исполнительная система (система привода); БП - блок памяти;  - сигнал управления;
- сигнал управления; 
 - информация об угле поворота, скорости, ускорении и моменте двигателя;
- информация об угле поворота, скорости, ускорении и моменте двигателя;  - сигнал, разрешающий обучение либо воспроизведение запомненного движения;
- сигнал, разрешающий обучение либо воспроизведение запомненного движения;  - сигнал задания по перемещению, скорости и т. д. Во время обучения привод управляется от , и в блоке памяти фиксируется информация о фазовых координатах системы. При разрешении на воспроизведена запомненного цикла движения ИС управляется только от БП, и сигнал управления несет теперь функции прежнего сигнала . Блок памяти во время воспроизведения является носителем программы.
- сигнал задания по перемещению, скорости и т. д. Во время обучения привод управляется от , и в блоке памяти фиксируется информация о фазовых координатах системы. При разрешении на воспроизведена запомненного цикла движения ИС управляется только от БП, и сигнал управления несет теперь функции прежнего сигнала . Блок памяти во время воспроизведения является носителем программы.
Рис. 58
Схема на рис. 58б относится к адаптивной исполнительной системе, имеющей также свойство обучаемости, но второго вида. Здесь обозначено: БПП - блок памяти привода; СЧ - силовая часть с собственной схемой управления; УКП - устройство коррекции памяти;  - сигнал управления СЧ. Представим, что есть сигнал задания по скорости движения вала привода
- сигнал управления СЧ. Представим, что есть сигнал задания по скорости движения вала привода  рассматриваемой степени свободы, причем цикл кривой
рассматриваемой степени свободы, причем цикл кривой  состоит из конечного числа тактов. Внутри каждого такта СЧ управляется от БПП, память которого в начальный момент времени эксплуатации робота неорганизована. В конце такта определяется переходная функция системы
состоит из конечного числа тактов. Внутри каждого такта СЧ управляется от БПП, память которого в начальный момент времени эксплуатации робота неорганизована. В конце такта определяется переходная функция системы  усредненная на такте длительностью
усредненная на такте длительностью  Затем производится коррекция памяти для данных
Затем производится коррекция памяти для данных  действовавших в рассматриваемом такте, с целью приближения в первой половине такта к
действовавших в рассматриваемом такте, с целью приближения в первой половине такта к  во второй его половине с помощью
во второй его половине с помощью  В следующем такте система работает аналогично для новых в общем случае значений , . Задание
В следующем такте система работает аналогично для новых в общем случае значений , . Задание  в виде многократного повторения одного и того же цикла приводит к тому, что во время некоторого цикла внутри каждого такта организованная во время обучения ИС память обеспечивает управление СЧ, которому соответствует удовлетворительно малое отклонение от задания. На этом обучение ИС одному циклу движения заканчивается.
в виде многократного повторения одного и того же цикла приводит к тому, что во время некоторого цикла внутри каждого такта организованная во время обучения ИС память обеспечивает управление СЧ, которому соответствует удовлетворительно малое отклонение от задания. На этом обучение ИС одному циклу движения заканчивается.
В адаптивных системах привода самоорганизация правильных движений производится путем периодической подстройки параметров, управлений либо структур регуляторов. Подобные системы, называемые в литературе самонастраивающимися либо самоорганизующимися, способны удовлетворительно работать, если задающий сигнал обладает свойствами, которые продолжают существовать достаточно долго после окончания очередного процесса подстройки регулятора. Для получения требуемых качеств системы в условиях нестационарных воздействий необходимо, чтобы элементы памяти адаптивной системы хранили информацию об условиях оптимума движения для всех воспринимаемых значений приходящих извне сигналов. Это означает, что с такой памятью адаптивная система становится обучаемой. В начале эксплуатации при фиксированных параметрах объекта управления принципиально необходима целенаправленная организация состояния неорганизованной памяти системы, что возможно при многократном поступлении задающих и возмущающих извне воздействий. Это и составляет существо обучения. При изменении же параметров объекта управления из-за неизмеряемых температуры, влажности и т. д. требуется с течением времени добавочная переорганизация памяти. Добавочный процесс составляет существо адаптации.
Во время обучения происходит процесс целенаправленной организации состояния элементов памяти системы привода при многократном поступлении сигналов на ее входы. Целью обучения является приобретение реакций, соответствующих оптимальному механическому движению объекта управления.
Рассмотрим систему, которая в области ошибок вырабатывает правильные реакции путем последовательных приближений. Предположим, что сигнал поступает в БПП в виде параллельного двоичного кода. С помощью воздействия периодически корректируется состояние элементов памяти блока БПП. Включение в систему блока памяти привода БПП вместе с устройством ее коррекции УКП позволяет скомпенсировать нелинейность передаточных свойств силовой части СЧ соответствующей организацией памяти и придать системе в последующем свойство адаптации.
Примем, что (рис. 58 б) равно угловой скорости поворота звена  Очевидно, что если воспринимается блоком БПП на отрезке
Очевидно, что если воспринимается блоком БПП на отрезке  как постоянная величина, то эта величина может пониматься как задание на установившуюся скорость вращения вала привода. Пусть
как постоянная величина, то эта величина может пониматься как задание на установившуюся скорость вращения вала привода. Пусть  - задание на скорость вращения в конце рассматриваемого отрезка .
- задание на скорость вращения в конце рассматриваемого отрезка .
Сигнал  складывается из отдельных составляющих, которые представляют собой булевы функции переменных
складывается из отдельных составляющих, которые представляют собой булевы функции переменных  Заметим, что для робота
Заметим, что для робота  есть функция и момента силы сопротивления. Вид этих функций определяет передаточные свойства логической схемы и качество регулирования скорости . В процессе обучения информация о поступает в БПП и УКП в форме двоичных чисел. Сигнал может иметь двоичную и десятичную формы, однако во втором случае требуется его преобразование в двоичный код для подачи в УКП. Если после того, как закончилось обучение всем сигналам, прекратятся полностью корректирующие действия УКП в силу его неисправности, то система привода превратится в систему автоматического регулирования с оптимальной структурой, но потеряет в дальнейшем свойство адаптации.
есть функция и момента силы сопротивления. Вид этих функций определяет передаточные свойства логической схемы и качество регулирования скорости . В процессе обучения информация о поступает в БПП и УКП в форме двоичных чисел. Сигнал может иметь двоичную и десятичную формы, однако во втором случае требуется его преобразование в двоичный код для подачи в УКП. Если после того, как закончилось обучение всем сигналам, прекратятся полностью корректирующие действия УКП в силу его неисправности, то система привода превратится в систему автоматического регулирования с оптимальной структурой, но потеряет в дальнейшем свойство адаптации.
В процессе обучения системы привода данной совокупности сигналов  непрерывно минимизируется абсолютная величина рассогласования
непрерывно минимизируется абсолютная величина рассогласования  или в более общем случае величина
или в более общем случае величина  Эта минимизация происходит на каждом одинаково малом отрезке , которым квантована вся ось времени t. Внутри отрезка
Эта минимизация происходит на каждом одинаково малом отрезке , которым квантована вся ось времени t. Внутри отрезка  происходят два различных движения электропривода. На промежутке
происходят два различных движения электропривода. На промежутке  (рис. 59) выход БПП отключается и на вход СЧ поступает сигнал
(рис. 59) выход БПП отключается и на вход СЧ поступает сигнал  В первом варианте внутри СЧ может не управляться, во втором во время паузы
В первом варианте внутри СЧ может не управляться, во втором во время паузы  на вход СЧ поступает сигнал
на вход СЧ поступает сигнал  Внутри на участке
Внутри на участке  осуществляется коррекция памяти БПП на основе анализа движения системы на предыдущем отрезке , а на участке
осуществляется коррекция памяти БПП на основе анализа движения системы на предыдущем отрезке , а на участке  измеряются средние значения которые подаются на входы БПП и УКП. Каждой совокупности этих значений соответствует своя постоянная величина , выдаваемая логической схемой внутри
измеряются средние значения которые подаются на входы БПП и УКП. Каждой совокупности этих значений соответствует своя постоянная величина , выдаваемая логической схемой внутри  3а время производится измерение средней скорости
3а время производится измерение средней скорости  которая поступает на вход УКП и используется для вычисления коррекции памяти. Коррекция осуществляется по окончании отрезка
которая поступает на вход УКП и используется для вычисления коррекции памяти. Коррекция осуществляется по окончании отрезка  т. е. в начальной части следующего отрезка
т. е. в начальной части следующего отрезка  Смысл коррекции состоит в том, чтобы свести к минимуму абсолютную величину рассогласования между средним значением
Смысл коррекции состоит в том, чтобы свести к минимуму абсолютную величину рассогласования между средним значением  внутри паузы
внутри паузы  и средним значением
и средним значением  внутри импульса на отрезке обучения . Такой принцип управления связан с неизбежным запаздыванием после обучения кривой
внутри импульса на отрезке обучения . Такой принцип управления связан с неизбежным запаздыванием после обучения кривой  по отношению к
по отношению к  на величину не больше, чем длительность отрезка обучения . Чем меньше отрезок, которым квантуется ось времени, тем выше должна быть чувствительность измерителя скорости вращения для различения величины , внутри пауз и импульсов .
на величину не больше, чем длительность отрезка обучения . Чем меньше отрезок, которым квантуется ось времени, тем выше должна быть чувствительность измерителя скорости вращения для различения величины , внутри пауз и импульсов .
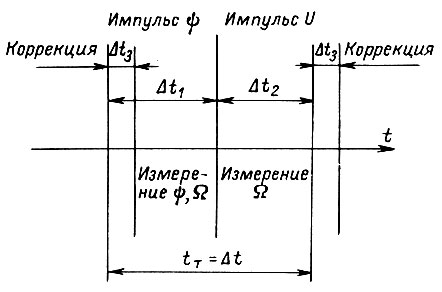
Рис. 59
Коррекция состояния элементов памяти для данной совокупности значений  действующей внутри , производится при условии появления этой совокупности внутри любого
действующей внутри , производится при условии появления этой совокупности внутри любого  до тех пор, пока не будут исчерпаны возможности для коррекции, т. е. пока не будет выполнено с заданной точностью условие
до тех пор, пока не будут исчерпаны возможности для коррекции, т. е. пока не будет выполнено с заданной точностью условие  Изменение состояния элементов памяти БПП производится по определенному правилу, заложенному в УКП. Алгоритм коррекции, осуществляемой последовательными приближениями, можно записать в следующей общей форме:
Изменение состояния элементов памяти БПП производится по определенному правилу, заложенному в УКП. Алгоритм коррекции, осуществляемой последовательными приближениями, можно записать в следующей общей форме:

где  - вектор, описывающий состояние элементов памяти; с помощью последовательных приближений отыскивается оптимальный вектор
- вектор, описывающий состояние элементов памяти; с помощью последовательных приближений отыскивается оптимальный вектор  n - номер приближения;
n - номер приближения;  - скаляр;
- скаляр;  - градиент функционала вектора .
- градиент функционала вектора .
Этот алгоритм может быть представлен также в иной форме:

которая в отличие от предыдущей записи содержит начальное значение 
В пределах технологического цикла движения рабочего органа робота форма кривой  последовательно приближаясь по мере обучения к функции
последовательно приближаясь по мере обучения к функции  независимо от предельной ошибки обучения, заложенной в конструкцию системы, не в состоянии стать копирующей кривую если последняя характеризуется некоторыми большими значениями производной
независимо от предельной ошибки обучения, заложенной в конструкцию системы, не в состоянии стать копирующей кривую если последняя характеризуется некоторыми большими значениями производной  Это связано с тем, что для механизма и электродвигателя существуют предельно допустимые ускорения. До их наступления значительное увеличение производной
Это связано с тем, что для механизма и электродвигателя существуют предельно допустимые ускорения. До их наступления значительное увеличение производной  достигается внутри отрезка приложением больших перепадов сигнала
достигается внутри отрезка приложением больших перепадов сигнала  к входу СЧ. Этим способом обычно решается задача формирования переходного процесса в регуляторе, оптимальном по быстродействию. Информация о моменте сопротивления, постоянно корректирующая величину , должна поступать возможно чаще.
к входу СЧ. Этим способом обычно решается задача формирования переходного процесса в регуляторе, оптимальном по быстродействию. Информация о моменте сопротивления, постоянно корректирующая величину , должна поступать возможно чаще.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'