5. Анализ способов управления электродвигателями
На примере некоторых схем управления электродвигателями выявим такие особенности передаточных свойств силовой части, которые могут явиться причиной возникновения устойчивых колебаний скорости в процессе обучения системы привода. На рис. 65 изображена схема управления двухфазного двигателя от транзисторного усилителя. Усилитель построен по симметричной схеме и состоит из двух транзисторов  входного и выходного трансформаторов
входного и выходного трансформаторов 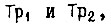 двухполупериодного выпрямителя
двухполупериодного выпрямителя  предназначенного для коллекторного питания триодов. Сопротивлением коллекторной нагрузки триода
предназначенного для коллекторного питания триодов. Сопротивлением коллекторной нагрузки триода  является обмотка
является обмотка  а триода
а триода  - обмотка
- обмотка  трансформатора
трансформатора  В данном усилителе триоды проводят ток поочередно в разные полупериоды входного сигнала, частота которого равна частоте переменной э. д. с, питающей мост
В данном усилителе триоды проводят ток поочередно в разные полупериоды входного сигнала, частота которого равна частоте переменной э. д. с, питающей мост  Так как токи в обмотках
Так как токи в обмотках  и протекают в противоположных направлениях, то на зажимах обмотки
и протекают в противоположных направлениях, то на зажимах обмотки  получает гармоническое колебание частоты входного сигнала, усиленное по амплитуде. Рассматриваемая схема усилителя работает в диапазоне частот, обычно используемых в следящих системах. Она обладает малым дрейфом, который присущ уравновешенным системам переменного тока.
получает гармоническое колебание частоты входного сигнала, усиленное по амплитуде. Рассматриваемая схема усилителя работает в диапазоне частот, обычно используемых в следящих системах. Она обладает малым дрейфом, который присущ уравновешенным системам переменного тока.
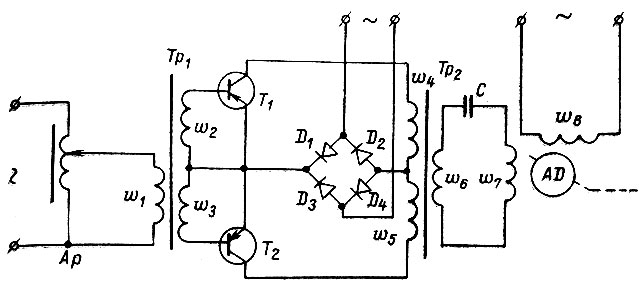
Рис. 65
На рис. 66 изображена эквивалентная схема усилителя с учетом эквивалентной схемы электродвигателя.
Рис. 66
Для определения амплитуд и фаз токов и напряжений воспользуемся символическим методом, применение которого возможно, если предположить, что все токи и напряжения являются синусоидальными функциями времени одинаковой частоты. Эквивалентная схема справедлива для области низких частот, когда индуктивностями рассеяния трансформаторов можно пренебречь. Представим каждый полупроводниковый триод как линейный преобразователь. Здесь приняты обозначения:
 - комплексное напряжение на обмотке
- комплексное напряжение на обмотке  трансформатора
трансформатора 
 - комплексный ток обмотки трансформатора
- комплексный ток обмотки трансформатора
 - ток базы триода, приведенный к обмотке ;
- ток базы триода, приведенный к обмотке ;
 - напряжение на обмотке
- напряжение на обмотке  трансформатора
трансформатора  приведенное к обмотке ;
приведенное к обмотке ;
 - комплексная разность потенциалов баз триодов, приведенная к обмотке ;
- комплексная разность потенциалов баз триодов, приведенная к обмотке ;
 - токи коллекторов триодов
- токи коллекторов триодов 
 - напряжения на обмотках
- напряжения на обмотках  трансформатора
трансформатора 
 - комплексная разность потенциалов коллекторов триодов;
- комплексная разность потенциалов коллекторов триодов;
 - комплексное напряжение на обмотке
- комплексное напряжение на обмотке  трансформатора
трансформатора  приведенное к обмотке
приведенное к обмотке 
 - комплексный ток обмотки
- комплексный ток обмотки  двигателя, приведенный к обмотке
двигателя, приведенный к обмотке
 - комплексное напряжение на обмотке двигателя, приведенное к обмотке
- комплексное напряжение на обмотке двигателя, приведенное к обмотке
 - активное сопротивление первичной обмотки трансформатора
- активное сопротивление первичной обмотки трансформатора
 - индуктивность первичной обмотки трансформатора
- индуктивность первичной обмотки трансформатора
 - приведенное активное сопротивление обмотки ;
- приведенное активное сопротивление обмотки ;
 - статический коэффициент усиления по напряжению триода;
- статический коэффициент усиления по напряжению триода;
 - внутреннее сопротивление полупроводникового триода;
- внутреннее сопротивление полупроводникового триода;
 - активное сопротивление обмотки
- активное сопротивление обмотки  трансформатора
трансформатора 
 - индуктивность обмотки
- индуктивность обмотки
 - приведенное активное сопротивление обмотки
- приведенное активное сопротивление обмотки 
 - приведенная емкость конденсатора;
- приведенная емкость конденсатора;
 - приведенное активное сопротивление обмотки двигателя;
- приведенное активное сопротивление обмотки двигателя;
 - приведенная индуктивность обмотки двигателя;
- приведенная индуктивность обмотки двигателя;
- активное сопротивление вторичной цепи электродвигателя, приведенное к обмоткам и
 - скольжение ротора;
- скольжение ротора; 
В схеме, изображенной на рис. 65, поочередно работают два канала: при работающем усилителе 1 не работает усилитель 2, и наоборот. Это означает, что в первый полупериод синусоидального напряжения  ток проводит триод
ток проводит триод  , во второй полупериод - триод
, во второй полупериод - триод  . Будем считать, что коллекторный ток триода составляет первую половину синусоиды, коллекторный ток триода - вторую половину. Полную синусоиду составляет сумма этих токов. Аналогичное предположение сделаем относительно суммы напряжений
. Будем считать, что коллекторный ток триода составляет первую половину синусоиды, коллекторный ток триода - вторую половину. Полную синусоиду составляет сумма этих токов. Аналогичное предположение сделаем относительно суммы напряжений  суммы токов баз триодов
суммы токов баз триодов  суммы напряжений
суммы напряжений 
Ниже даны формулы для токов и напряжений эквивалентной схемы усилителя:
где  входное сопротивление усилителя, приведенное к обмотке
входное сопротивление усилителя, приведенное к обмотке



Приведение величины токов, напряжений, сопротивлений, индуктивностей и емкостей производится следующим образом:



где  - коэффициент трансформации асинхронного электродвигателя;
- коэффициент трансформации асинхронного электродвигателя;

Определим также величину 

где β - статический коэффициент усиления по току триода, включенного по схеме с общим эмиттером.
В данном случае управление асинхронным двухфазным двигателем основано на создании в машине эллиптического поля, т. е. несимметричного режима работы. Зависимость между моментом двигателя и скольжением имеет вид

где  - угловая скорость идеального холостого хода двигателя;
- угловая скорость идеального холостого хода двигателя;

d - коэффициент, равный отношению напряжения на управляющей обмотке  к напряжению на обмотке
к напряжению на обмотке 
 - индуктивность рассеяния обмотки .
- индуктивность рассеяния обмотки .
Скорость вращения двигателя представим в соответствии с [29] в виде

где

- напряжение на обмотке

Эти выражения справедливы при измерении момента  в г*см,
в г*см, 
Выявление возможности возникновения устойчивых колебаний скорости  в процессе обучения состоит в определении функции
в процессе обучения состоит в определении функции  Пренебрежем инерционностью электромагнитных цепей, учитывая только электромеханическую постоянную привода
Пренебрежем инерционностью электромагнитных цепей, учитывая только электромеханическую постоянную привода  Если
Если  где
где  - число апериодических звеньев, включенных между ЛС и входом транзисторного усилителя, нагруженного на ток обмотки , то исследование коэффициента
- число апериодических звеньев, включенных между ЛС и входом транзисторного усилителя, нагруженного на ток обмотки , то исследование коэффициента  рассматриваемой схемы дает возможность установить наличие указанных колебаний. Этот коэффициент равен
рассматриваемой схемы дает возможность установить наличие указанных колебаний. Этот коэффициент равен 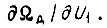 Поскольку напряжение
Поскольку напряжение  пропорционально
пропорционально  что следует из приведенных формул, то достаточно рассмотреть производную
что следует из приведенных формул, то достаточно рассмотреть производную 

Рис. 67
График функции  для электродвигателя АДП-362
для электродвигателя АДП-362  построен на рис. 67. Здесь
построен на рис. 67. Здесь  г*см. На рис. 68 изображена зависимость
г*см. На рис. 68 изображена зависимость 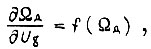 полученная из функции
полученная из функции 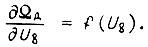 Эксплуатируя привод в области скоростей
Эксплуатируя привод в области скоростей  рад/с, мы не получим устойчивых колебаний, если пренебрежем зоной нечувствительности. Данный вывод получен при неучете нелинейности характеристик транзисторов и трансформаторов
рад/с, мы не получим устойчивых колебаний, если пренебрежем зоной нечувствительности. Данный вывод получен при неучете нелинейности характеристик транзисторов и трансформаторов  Аналогичный вывод следует из анализа амплитудного управления двухфазного двигателя, когда
Аналогичный вывод следует из анализа амплитудного управления двухфазного двигателя, когда  а также из анализа управления трехфазного двигателя. Наличие зоны нечувствительности может привести к беспорядочным колебаниям скорости около тех точек, в которых привод должен работать после прохождения скорости
а также из анализа управления трехфазного двигателя. Наличие зоны нечувствительности может привести к беспорядочным колебаниям скорости около тех точек, в которых привод должен работать после прохождения скорости  Это вызвано неопределенностью процесса обучения системы привода внутри зоны в смысле нахождения конкретного значения
Это вызвано неопределенностью процесса обучения системы привода внутри зоны в смысле нахождения конкретного значения  для которого
для которого  Поэтому обучение электропривода необходимо производить для всех скоростей, исключая точку
Поэтому обучение электропривода необходимо производить для всех скоростей, исключая точку
Рис. 68
Рассмотрим частотное управление асинхронным двигателем. Напряжение фазы статора асинхронного двигателя может быть представлено следующим образом:

где  - э. д. с. фазы, вызванная основным магнитный потоком двигателя;
- э. д. с. фазы, вызванная основным магнитный потоком двигателя;  - число витков фазы;
- число витков фазы;  - обмоточный коэффициент статора;
- обмоточный коэффициент статора;  - частота питающей сети; Φ - основной магнитный поток двигателя.
- частота питающей сети; Φ - основной магнитный поток двигателя.
Из формулы следует, что изменение частоты при неизменном напряжении вызывает примерно обратно пропорциональное изменение магнитного потока, а это при отклонении частоты от номинальной в большую или меньшую сторону вызывает либо недоиспользование, либо насыщение магнитной системы двигателя. При этом будут меняться максимальный момент, коэффициент мощности, к. п. д. и другие показатели. Очевидно, необходимо одновременно с изменением частоты изменить напряжение на зажимах двигателя. Однако рассмотрим передаточный коэффициент двигателя  управляемого преобразователем частоты силовой части привода, когда отсутствуют связи, обеспечивающие требуемый закон регулирования напряжения. Для основной гармоники напряжения автономного инвертора формула скольжения записывается в виде
управляемого преобразователем частоты силовой части привода, когда отсутствуют связи, обеспечивающие требуемый закон регулирования напряжения. Для основной гармоники напряжения автономного инвертора формула скольжения записывается в виде
где  - число фаз статора;
- число фаз статора;  - сопротивление фазы статора;
- сопротивление фазы статора;  - приведенное сопротивление обмотки ротора;
- приведенное сопротивление обмотки ротора;  - индуктивное сопротивление рассеяния обмоток;
- индуктивное сопротивление рассеяния обмоток;  - напряжение фазы статора;
- напряжение фазы статора;  - синхронная угловая скорость вращения ротора. Угловая скорость в об/мин:
- синхронная угловая скорость вращения ротора. Угловая скорость в об/мин:
где p - число пар полюсов; 
Получим выражение для производной 
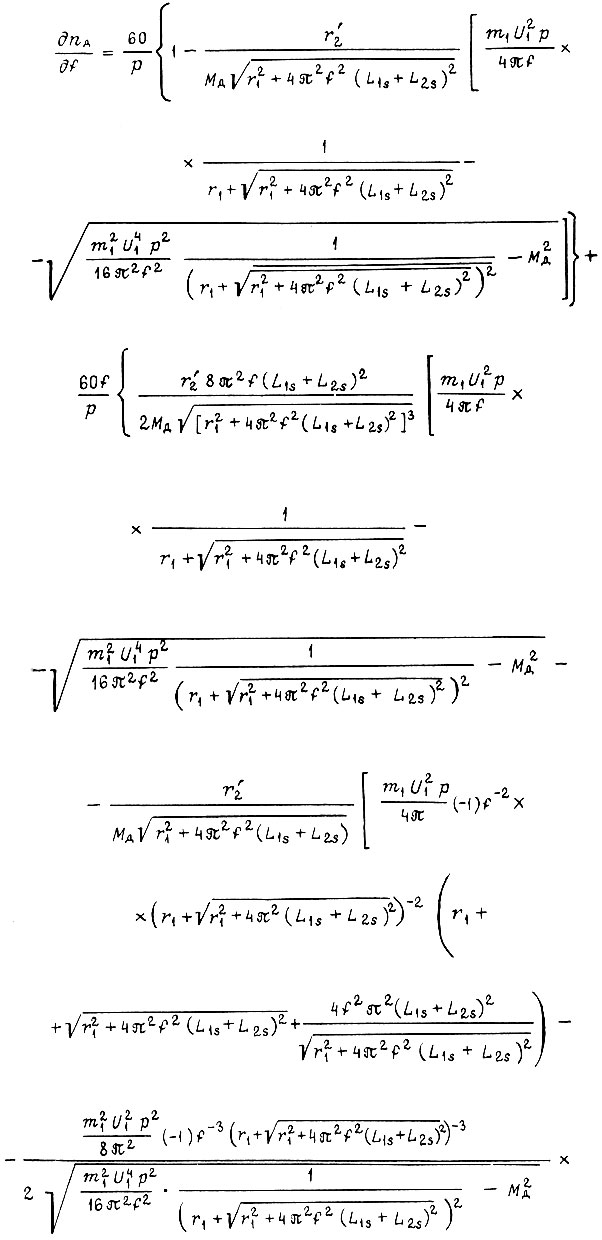

Рис. 69
График функции 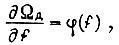 зависящей от частоты, построен на рис. 69 в зоне 25 + 75 Гц для трехфазного асинхронного двигателя с моментом
зависящей от частоты, построен на рис. 69 в зоне 25 + 75 Гц для трехфазного асинхронного двигателя с моментом  равным номинальному
равным номинальному 
 На рис. 70 изображена функция
На рис. 70 изображена функция  в зоне частот
в зоне частот  Гц она не содержит точек минимумов, т. е. в этой зоне отсутствуют устойчивее колебания
Гц она не содержит точек минимумов, т. е. в этой зоне отсутствуют устойчивее колебания  во время обучения системы привода при неучете остальных преобразователей силовой части. Если энергетические показатели электродвигателя можно признать удовлетворительными, когда Гц, то, несмотря на это, проектирование процесса обучения целесообразно проводить только в области
во время обучения системы привода при неучете остальных преобразователей силовой части. Если энергетические показатели электродвигателя можно признать удовлетворительными, когда Гц, то, несмотря на это, проектирование процесса обучения целесообразно проводить только в области  Гц или
Гц или  Гц. В каждой области величина
Гц. В каждой области величина  однополярна.
однополярна.
Рис. 70
На рис. 71 показана зависимость  при изменении напряжения, питающего статорную обмотку, пропорционально изменению частоты. В области
при изменении напряжения, питающего статорную обмотку, пропорционально изменению частоты. В области  рад/с характеристика
рад/с характеристика  не имеет точек минимумов, и, следовательно, условия невозникновения устойчивых колебаний скорости во время обучения электропривода применяют только на горизонтальных участках характеристики.
не имеет точек минимумов, и, следовательно, условия невозникновения устойчивых колебаний скорости во время обучения электропривода применяют только на горизонтальных участках характеристики.
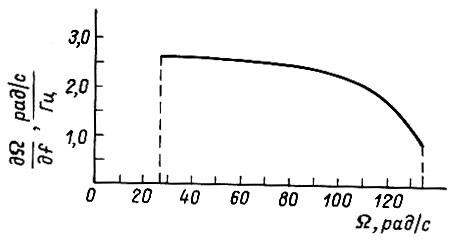
Рис. 71
Функция Гц на рис. 71 является более пологой по сравнению с функцией, показанной на рис. 70 для случая  и поэтому над осью абсцисс захватывает больший диапазон скоростей. Кроме того, на рис. 69 имеем
и поэтому над осью абсцисс захватывает больший диапазон скоростей. Кроме того, на рис. 69 имеем  для области, где
для области, где  Гц, т. е., включив эту область в рабочие частоты, можем получить
Гц, т. е., включив эту область в рабочие частоты, можем получить  и расходимость процесса обучения. Наконец, поскольку в последнем случае частота и напряжение изменяются одновременно, электродвигатель работает приблизительно при постоянной плотности магнитного потока.
и расходимость процесса обучения. Наконец, поскольку в последнем случае частота и напряжение изменяются одновременно, электродвигатель работает приблизительно при постоянной плотности магнитного потока.
Для схемы постоянного тока (см. рис. 10) и однополярных импульсов  функция
функция  есть
есть
Учет условий сходимости обучения при выборе коэффициентов γ состоит здесь только в учете сходимости на горизонтальных участках функции 
Рассмотрим управление электродвигателем постоянного тока от схемы однополупериодного двухтактного выпрямителя, позволяющего иметь реверс привода.
Ток якоря  на участках
на участках  подчиняется дифференциальному уравнению
подчиняется дифференциальному уравнению

где  - сопротивление якорной цепи;
- сопротивление якорной цепи;  - индуктивность обмотки якоря;
- индуктивность обмотки якоря;  - амплитуда питающего напряжения;
- амплитуда питающего напряжения;  - э. д. с. двигателя.
- э. д. с. двигателя.
Пусть на участках  и
и  Для первого участка
Для первого участка
где 
Для второго участка решение имеет вид
Средняя величина тока, протекающего в якоре двигателя:
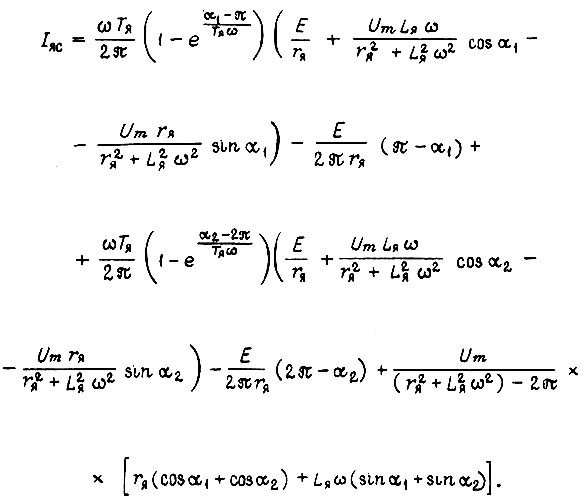
Вращающий момент и скорость  определяются из формул
определяются из формул
и
где  и
и  - конструктивные коэффициенты.
- конструктивные коэффициенты.
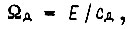
Допустив, что  получаем формулу для
получаем формулу для
На рис. 72  построен график функции
построен график функции  соответствующей току
соответствующей току  а. В диапазоне
а. В диапазоне  В
В  представляет собой монотонно нарастающую функцию. Алгоритм обучения привода проектируется для этого диапазона из условия сходимости процесса на горизонтальных участках функции
представляет собой монотонно нарастающую функцию. Алгоритм обучения привода проектируется для этого диапазона из условия сходимости процесса на горизонтальных участках функции  Аналогичная функция в области отрицательных значений э. д. с. может быть
Аналогичная функция в области отрицательных значений э. д. с. может быть
построена при  и
и  Поэтому реверсивное управление двигателя характеризуется функцией
Поэтому реверсивное управление двигателя характеризуется функцией  симметричной относительно оси ординат и имеющей минимум. Проектирование алгоритма обучения электропривода в этом случае включает в себя выбор коэффициентов γ из условия отсутствия устойчивых колебаний скорости вращения около точки, где скорость равна нулю. Этот вывод относится к области
симметричной относительно оси ординат и имеющей минимум. Проектирование алгоритма обучения электропривода в этом случае включает в себя выбор коэффициентов γ из условия отсутствия устойчивых колебаний скорости вращения около точки, где скорость равна нулю. Этот вывод относится к области  а в зоне, где
а в зоне, где  производная
производная  изменяет знак, что при
изменяет знак, что при  может привести к несходящемуся процессу обучения.
может привести к несходящемуся процессу обучения.
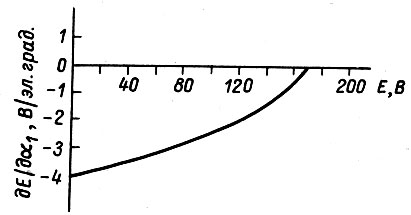
Рис. 72
Заметим, что организация требуемого состояния памяти системы привода в процессе обучения может быть реализована, когда силовая часть отсутствует. Формирование правильных реакций может происходить, например, за счет создания малых токов во многих обмотках электродвигателя. Эта идея может быть отнесена и к гидравлической системе. Каждая из обмоток подключается к выходу своей узловой схемы, выходной логический элемент которой играет роль слаботочного ключа, управляющего током обмотки.
При организации состояния обмоток электродвигателя постоянного тока, состояние одной обмотки описывается уравнениями

момент двигателя 
где U - напряжение питания обмотки;  - момент, развиваемый двигателем при протекании тока
- момент, развиваемый двигателем при протекании тока  по i-й обмотке с сопротивлением
по i-й обмотке с сопротивлением  - конструктивные коэффициенты;
- конструктивные коэффициенты;  - момент инерции привода; - суммарный момент двигателя;
- момент инерции привода; - суммарный момент двигателя;  - момент в шарнире рабочего органа робота.
- момент в шарнире рабочего органа робота.
Скорость вращения  в переходном процессе при
в переходном процессе при 
Число возбужденных обмоток определяет переходную функцию системы.
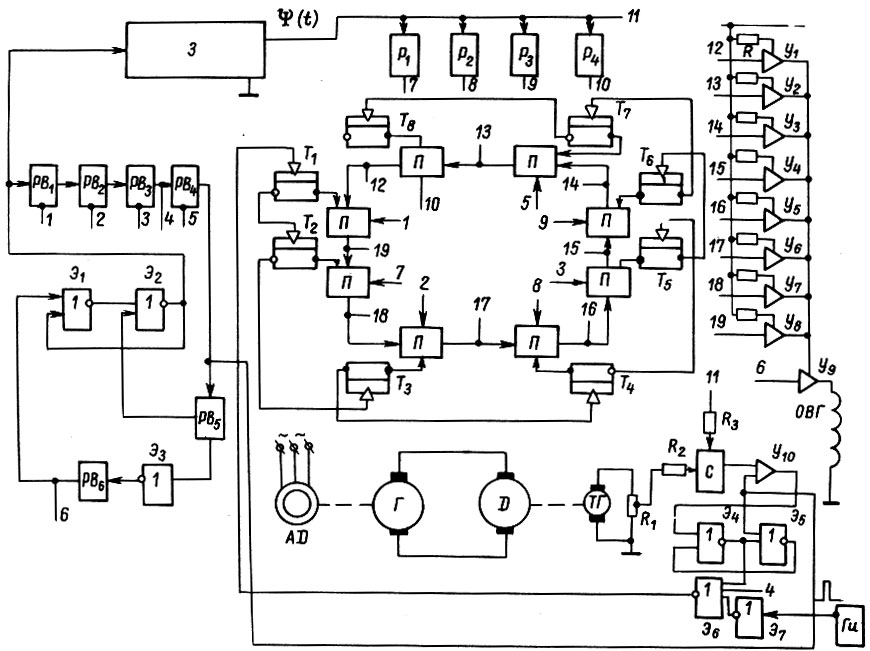
Рис. 73
Приведем некоторые сведения из экспериментов по организации памяти в системе привода. На рис. 73 показана часть схемы электропривода с организацией памяти с перебором всех состояний. Здесь обозначено: З - задатчик сигнала  в пределах цикла
в пределах цикла 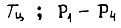 - релейные элементы; Э1-Э7 - элементы, реализующие функцию
- релейные элементы; Э1-Э7 - элементы, реализующие функцию  - реле времени;
- реле времени;  - усилители; C - элемент сравнения сигнала задатчика и сигнала, пропорционального скорости вращения двигателя; T - триггеры; П - узловые схемы, реализующие функции
- усилители; C - элемент сравнения сигнала задатчика и сигнала, пропорционального скорости вращения двигателя; T - триггеры; П - узловые схемы, реализующие функции  ГИ - генератор импульсов; АД - асинхронный электродвигатель, ТГ - тахогенератор.
ГИ - генератор импульсов; АД - асинхронный электродвигатель, ТГ - тахогенератор.
Схема, изображенная на рис. 73, показывает возможность реализации системы привода с целенаправленной организацией памяти путем перебора всех состояний. В экспериментальной установке в качестве силового преобразователя использована электрическая машина в системе генератор-двигатель.
Вместо блока конъюнкций применены реле  а также
а также  , срабатывание которых имитирует изменение значений сигнала задания внутри цикла движения. Применение иллюстрируют возможность частичной замены информации 0 информацией о времени. Схемы П собраны в кольцо, а на их входы поступают сигналы от триггеров. Данная схема построена не так, как предложено выше строить блок памяти привода (БПП). Ее особенность заключена также и в том, что организацию памяти можно осуществить только для одной формы кривой сигнала внутри цикла движения, снимаемого с выхода задатчика.
, срабатывание которых имитирует изменение значений сигнала задания внутри цикла движения. Применение иллюстрируют возможность частичной замены информации 0 информацией о времени. Схемы П собраны в кольцо, а на их входы поступают сигналы от триггеров. Данная схема построена не так, как предложено выше строить блок памяти привода (БПП). Ее особенность заключена также и в том, что организацию памяти можно осуществить только для одной формы кривой сигнала внутри цикла движения, снимаемого с выхода задатчика.
Процесс организации памяти происходит следующим образом. Задатчик после его запуска триггером, образованным элементами  , начинает формировать ступенчатую кривую в пределах цикла. Сигнал есть напряжение на сопротивлении
, начинает формировать ступенчатую кривую в пределах цикла. Сигнал есть напряжение на сопротивлении  равное потенциалу точки 11, изменяющемуся во времени. Это напряжение управляет реле имеющими различные уставки, и элементом сравнения С.
равное потенциалу точки 11, изменяющемуся во времени. Это напряжение управляет реле имеющими различные уставки, и элементом сравнения С.
Одновременно с запуском задатчика происходит запуск группы реле времени . Выходные сигналы реле и поступают каждый к входу своей схемы П. Заполнение счетчика возможно, если поступают импульсы с выхода элемента 
При появлении сигнала на входах реле а также информации о состоянии реле на входах схем П и неизменных положениях элементов памяти  в каждый момент времени внутри цикла в возбужденном состоянии находится всегда определенная часть усилителей
в каждый момент времени внутри цикла в возбужденном состоянии находится всегда определенная часть усилителей  Усилитель
Усилитель  включен каскадно с группой
включен каскадно с группой  и управляется потенциалом точки 6, т. е. в пределах цикла всегда открыт. Это означает, что при изменении амплитуды по обмотке возбуждения генератора ОВГ протекает ток определенной формы, зависящей от положения элементов памяти .
и управляется потенциалом точки 6, т. е. в пределах цикла всегда открыт. Это означает, что при изменении амплитуды по обмотке возбуждения генератора ОВГ протекает ток определенной формы, зависящей от положения элементов памяти .
Информация о скорости вращения вала двигателя поступает на вход элемента с в виде э. д. с. тахогенератора, часть которой снимается с делителя  через сопротивление
через сопротивление 
Конец цикла движения фиксируется срабатыванием реле времени  переключающего триггер из элементов . При этом потенциал точки 11 становится равным нулю, задатчик и реле приходит в исходное состояние. Реле
переключающего триггер из элементов . При этом потенциал точки 11 становится равным нулю, задатчик и реле приходит в исходное состояние. Реле  успевает переключить триггер в прежнее состояние, приводящее к новому запуску задатчика, т. е. к началу нового цикла движения. После того, как отпустило реле восстановление потенциала точки 6, отпирающего усилитель , происходит с некоторой задержкой во времени. В результате двигатель успевает остановиться, а затем начинает движение в новом цикле.
успевает переключить триггер в прежнее состояние, приводящее к новому запуску задатчика, т. е. к началу нового цикла движения. После того, как отпустило реле восстановление потенциала точки 6, отпирающего усилитель , происходит с некоторой задержкой во времени. В результате двигатель успевает остановиться, а затем начинает движение в новом цикле.
Если внутри цикла сигнал и сигнал, пропорциональный э. д. с. тахогенератора, не равны друг другу с заданной точностью, определяемой сопротивлениями  то это приводит в результате действия элемента С к срабатыванию усилителя
то это приводит в результате действия элемента С к срабатыванию усилителя  и переключению триггера, образованного элементами
и переключению триггера, образованного элементами  Тогда после того как сработало реле
Тогда после того как сработало реле  происходит коррекция памяти логической схемы при прохождении импульсов генератора ГИ к выходу элемента
происходит коррекция памяти логической схемы при прохождении импульсов генератора ГИ к выходу элемента  и затем к входу двоичного счетчика В следующем цикле движения состояние элементов памяти является другим, поэтому кривая скорости вращения
и затем к входу двоичного счетчика В следующем цикле движения состояние элементов памяти является другим, поэтому кривая скорости вращения  имеет иную форму. Циклы организации памяти логической схемы следуют друг за другом до тех пор, пока сигналы и в пределах цикла не совпадут.
имеет иную форму. Циклы организации памяти логической схемы следуют друг за другом до тех пор, пока сигналы и в пределах цикла не совпадут.
Рис. 74
Осциллограммы на рис. 74 иллюстрируют процесс перебора всех состояний элементов памяти при обучении системы привода. По окончании перебора кривая скорости приближается к функции , при этом момент сопротивления 
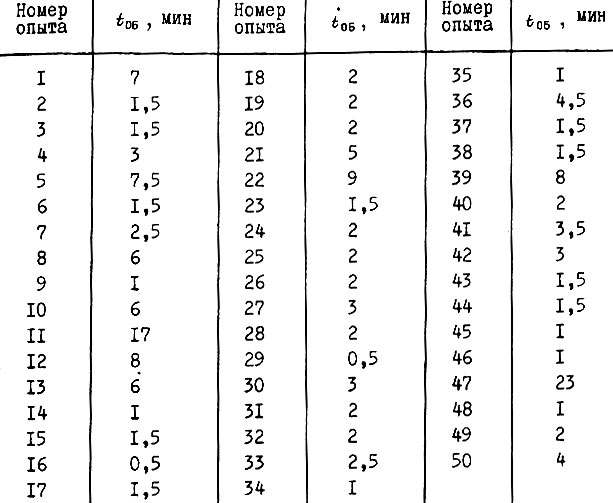
Таблица 3
Ниже помещены (табл. 3) лабораторные замеры длительности полной организации памяти  для одного сигнала , имеющего форму, показанную на рис. 74.
для одного сигнала , имеющего форму, показанную на рис. 74.
Из таблицы определено средневероятностное время обучения 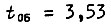 мин.
мин.
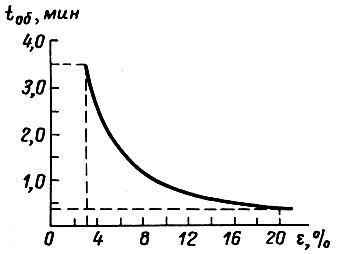
Рис. 75
На рис. 75 представлена зависимость длительности организации памяти логической схемы для одного сигнала в функции максимальной ошибки обучения ε, %. Длительность цикла 
Рис. 76. 1-2
На рис. 76 приведены осциллограммы 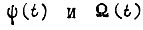 , которые иллюстрируют один из процессов организации памяти логической схемы по первому алгоритму при моменте сопротивления Здесь речь идет о системе привода, содержащей БПП с блоком конъюнкций и устройство коррекции памяти (см. рис. 60, 61).
, которые иллюстрируют один из процессов организации памяти логической схемы по первому алгоритму при моменте сопротивления Здесь речь идет о системе привода, содержащей БПП с блоком конъюнкций и устройство коррекции памяти (см. рис. 60, 61).
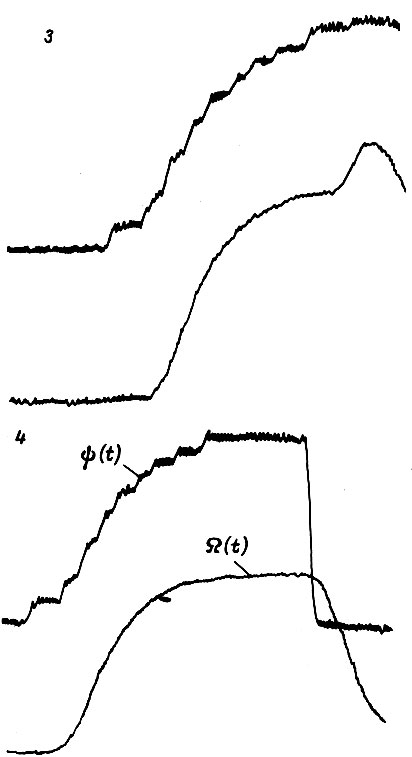
Рис. 76. 3-4
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'