6. Применение аналоговых запоминающих ячеек
Из рассмотрения предложенной выше схемы блока памяти привода (БПП) следует, что для обучаемой системы с малой заданной ошибкой обучения нужно большое количество триггеров. Для уменьшения числа необходимых микросхем БПП можно построить на аналоговых ячейках. Тогда потребуется перестройка схемы УКП и узлов согласования входов и выходов БПП, УКП, СЧ.
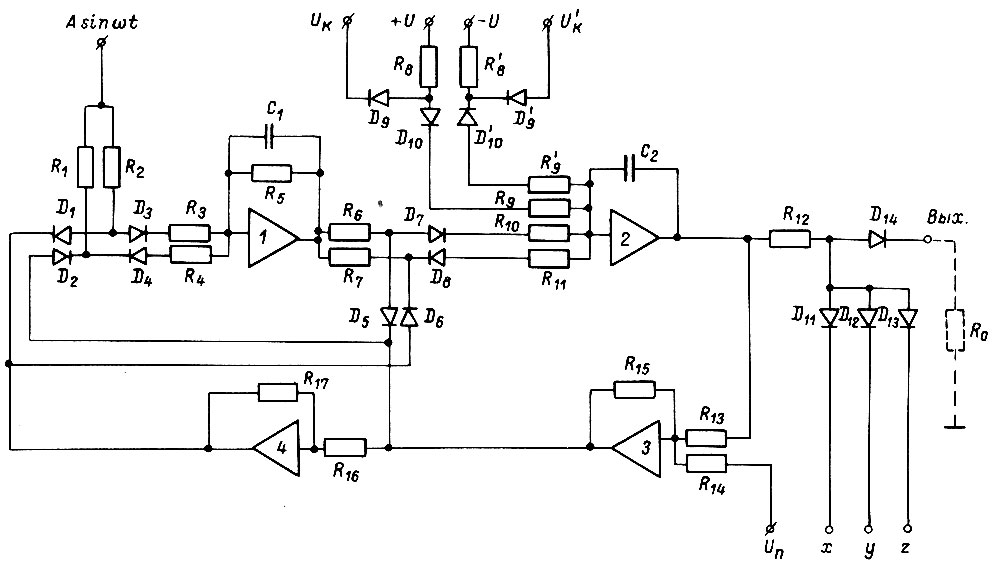
Рис. 77
На рис. 77 изображена схема ячейки запоминающего устройства, построенная на операционных полупроводниковых усилителях. Запоминаемой величиной является напряжение  на выходе усилителя 2, которое может быть передано к выходу ячейки через
на выходе усилителя 2, которое может быть передано к выходу ячейки через  Аналогично все ячейки подключаются на выходах параллельно
Аналогично все ячейки подключаются на выходах параллельно  под которым понимается входное сопротивление преобразователя, управляющего двигателем. Сигнал на выходе ячейки появляется тогда, когда на входы x, y, z поступила команда в виде положительных потенциалов, запирающих диоды
под которым понимается входное сопротивление преобразователя, управляющего двигателем. Сигнал на выходе ячейки появляется тогда, когда на входы x, y, z поступила команда в виде положительных потенциалов, запирающих диоды  Усилители 1-4 образуют регулирующую систему, поддерживающую U2 на запомненном уровне в условиях помех и дрейфа микроструктуры.
Усилители 1-4 образуют регулирующую систему, поддерживающую U2 на запомненном уровне в условиях помех и дрейфа микроструктуры.
Внутри каждого периода пилообразного напряжения  наступает момент, когда
наступает момент, когда  и при этом усилитель 3, сравнивающий входные сигналы, переключает свой потенциал выхода
и при этом усилитель 3, сравнивающий входные сигналы, переключает свой потенциал выхода  на
на  До этого момента диоды
До этого момента диоды 
 а также
а также  (в результате действия инвертора 4) были открыты, а диоды
(в результате действия инвертора 4) были открыты, а диоды 
 заперты. Усилитель
заперты. Усилитель  управлялся от напряжения
управлялся от напряжения  но не управлял усилителем 2. Период
но не управлял усилителем 2. Период  значительно меньше периода
значительно меньше периода  и определяется заданной точностью стабилизации
и определяется заданной точностью стабилизации  После изменения полярности
После изменения полярности 
 не управляется от а его выход соединяется через
не управляется от а его выход соединяется через 
 либо
либо 
 с входом усилителя 2. В результате происходит направленное изменение величины
с входом усилителя 2. В результате происходит направленное изменение величины  за счет интегрирования спадающего по экспоненте напряжения выхода
за счет интегрирования спадающего по экспоненте напряжения выхода  Если в момент отпирания
Если в момент отпирания 
 то регулировка не имеет места. Это означает, что внутри последнего периода кривой напряжение из условиях помех и дрейфа микроструктуры оставалось неизменным. Потенциалы входов
то регулировка не имеет места. Это означает, что внутри последнего периода кривой напряжение из условиях помех и дрейфа микроструктуры оставалось неизменным. Потенциалы входов  либо
либо  переключаются на
переключаются на  либо
либо  когда узел, управляющий адаптацией системы привода, посылает команду на изменение , т. е. на запоминание данной ячейкой на новом уровне. В этом режиме запираются диоды
когда узел, управляющий адаптацией системы привода, посылает команду на изменение , т. е. на запоминание данной ячейкой на новом уровне. В этом режиме запираются диоды  либо
либо 
На выходе апериодического звена, образованного 
 в установившемся режиме напряжение
в установившемся режиме напряжение

где  b - производная пилообразной функции
b - производная пилообразной функции  внутри ее период да, определяемого как отношение
внутри ее период да, определяемого как отношение 
 - заданная величина кванта .
- заданная величина кванта .
Если максимальное значение , которое способна хранить ячейка, есть  то число разных возможных значений
то число разных возможных значений  После отпирания диодов
После отпирания диодов  напряжение
напряжение  спадает по экспоненте
спадает по экспоненте  от начального значения
от начального значения  до нуля. При этом изменяется напряжение :
до нуля. При этом изменяется напряжение :

где  Очевидно,
Очевидно,  не должно превысить . При
не должно превысить . При  и соответственно
и соответственно  получаем
получаем

откуда

при условии, что  Формула (174) справедлива, если пренебречь в процессе регулирования величиной, меньшей
Формула (174) справедлива, если пренебречь в процессе регулирования величиной, меньшей  Она позволяет определить амплитуду напряжения
Она позволяет определить амплитуду напряжения  в функции
в функции  Амплитуда пилообразного напряжения
Амплитуда пилообразного напряжения  есть
есть  где наличие
где наличие  в кривой
в кривой  позволяет регулировать напряжение в случае, если оно запомнено как
позволяет регулировать напряжение в случае, если оно запомнено как 
Напряжение определяем как

Напряжение  выбираем равным . Благодаря его наличию успевает закончиться переходный процесс в апериодическом звене
выбираем равным . Благодаря его наличию успевает закончиться переходный процесс в апериодическом звене  после отпирания диодов
после отпирания диодов  до того момента, когда нарастая, проходит нуль. Напряжение
до того момента, когда нарастая, проходит нуль. Напряжение  (см. рис. 77) сигнала, корректирующего в процессе адаптации системы привода, определяем из условия
(см. рис. 77) сигнала, корректирующего в процессе адаптации системы привода, определяем из условия

где 
 - длительность коррекции при адаптации системы.
- длительность коррекции при адаптации системы.
В этом случае максимальное значение  есть
есть  Поэтому при
Поэтому при 

где  - период дискретизации оси времени, внутри которого производится коррекция . при адаптации системы;
- период дискретизации оси времени, внутри которого производится коррекция . при адаптации системы; 

Для 
 получаем
получаем  Задавая значения
Задавая значения 
 получаем
получаем 
Остальные сопротивления могут быть приняты равными  Величину
Величину  выбираем из условия получения надежного открытия либо запирания диодов
выбираем из условия получения надежного открытия либо запирания диодов  потенциалами выходов
потенциалами выходов  например
например  при
при  Из данного расчета следует, что период пилообразного напряжения
Из данного расчета следует, что период пилообразного напряжения  равен
равен  т. е. внутри периода дискретизации происходят две регулировки напряжений
т. е. внутри периода дискретизации происходят две регулировки напряжений  в каждой i-й ячейке запоминающего устройства.
в каждой i-й ячейке запоминающего устройства.
Погрешность отработки задания по скорости вращения системой привода зависит от погрешностей запоминающего устройства. К ним относятся динамическая погрешность операционных усилителей, погрешность от конечности значения коэффициента усиления усилителя абсорбция конденсатора в цепи обратной связи усилителя .наличие фоновой составляющей . Учет погрешности вызванной тем, что  обладает собственным временем установления выходного сигнала
обладает собственным временем установления выходного сигнала  производится при экспериментальной настройке сопротивлений и напряжений источников, уточняющей расчетные значения параметров схемы. Возможна и компенсация эффекта абсорбции конденсатора обратной связи. Допустим, что фоновая составляющая
производится при экспериментальной настройке сопротивлений и напряжений источников, уточняющей расчетные значения параметров схемы. Возможна и компенсация эффекта абсорбции конденсатора обратной связи. Допустим, что фоновая составляющая  значительно превышает сумму всех остальных погрешностей, приведенных к выходу
значительно превышает сумму всех остальных погрешностей, приведенных к выходу 
Если система привода отрабатывает задание по скорости без контура адаптации с погрешностью  а фоновая составляющая равна
а фоновая составляющая равна  то с контуром адаптации и при наличии соответствующего датчика скорости теоретически можно изготовить систему, имеющую погрешность
то с контуром адаптации и при наличии соответствующего датчика скорости теоретически можно изготовить систему, имеющую погрешность

где 
При воздействии помех на схему запоминающего устройства новое значение погрешности  На рис. 78 изображена кривая регулируемого (в схеме на рис. 77) напряжения на выходе
На рис. 78 изображена кривая регулируемого (в схеме на рис. 77) напряжения на выходе  при воздействии на его вход неизменного во времени напряжения эквивалентной помехи
при воздействии на его вход неизменного во времени напряжения эквивалентной помехи  и при изменении в пределах
и при изменении в пределах  Здесь погрешность
Здесь погрешность  превышает
превышает  не более чем в 2,5 раза. Колебание , регулируемого в условиях помехи , характеризующееся неравенством
не более чем в 2,5 раза. Колебание , регулируемого в условиях помехи , характеризующееся неравенством  приводит к
приводит к  в n раз, где
в n раз, где  Погрешность же хранения информации в системе привода колеблется в рассмотренном случае в зоне (0,01-0,1) %.
Погрешность же хранения информации в системе привода колеблется в рассмотренном случае в зоне (0,01-0,1) %.
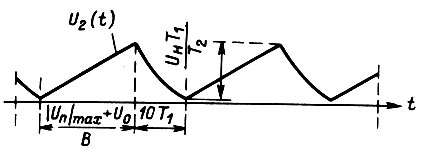
Рис. 78
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'