Глава 6. Применение роботов и манипуляторов для автоматизации и механизации погрузочно-разгрузочных и транспортно-складских работ
6.1. Технологические аспекты применения на погрузочно-разгрузочных и транспортно-складских работах робототехнических устройств и требования к ним
Одно из первых мест по затратам труда, стоимости и объему работ в народном хозяйстве занимают погрузочно-разгрузочные и вспомогательные операции. Для их выполнения используют различное подъемно-транспортное оборудование. В связи с этим производительность труда на таких работах в первую очередь зависит от наличия высокоэффективных средств механизации и автоматизации.
Следует отметить, что важной отличительной особенностью погрузочно-разгрузочных и транспортно-складских (ПРТС) работ является большое разнообразие рабочих операций, характеризующееся широкими диапазонами транспортируемых масс, размеров, форм грузов (объемов) и ограничениями на габаритные размеры средств обслуживания, работающих в стесненных условиях цехов, складских помещений, судов, железнодорожных вагонов и т. д.
Ниже рассматриваются технические средства, обеспечивающие выполнение следующих типовых видов ПРТС работ.
- Обслуживание машиностроительных предприятий, конвейерных линий, технологического оборудования.
- Обслуживание транспортных средств (морского, железнодорожного, автомобильного транспорта и т. д.) при перегрузке и складировании крупнотоннажных грузов и контейнеров.
- Штабелирование грузов и их комплектование в зоне хранения.
Приведенное разделение подъемно-транспортных работ вызвано качественным различием технических средств, с помощью которых осуществляются, эти работы.
Так, на заводах с крупносерийным и массовым выпуском продукции наиболее распространенным средством внутрицехового транспорта являются разнообразные виды конвейеров.
В рабочих операциях загрузки и разгрузки конвейерных систем, выполняемых промышленными роботами и манипуляторами (рис. 6.1), изделия или грузы в процессе захвата находятся в движении со скоростью конвейера. Это накладывает определенную специфику на процессы действия роботов.
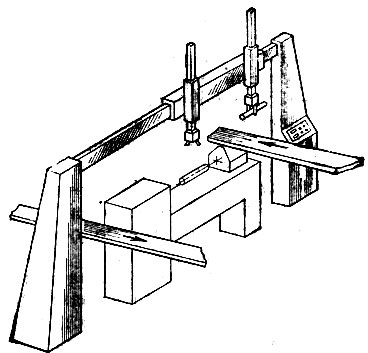
Рис. 6.1. Работа робота при двух цеховых конвейерах
При мелкосерийном и индивидуальном производствах применение промышленных роботов и манипуляторов с автоматическим управлением часто оказывается экономически нецелесообразным. В свою очередь, применение, например, талей и кранбалок при перегрузке штучных грузов оказывается малоэффективным. Это связано с высокими требованиями к квалификации такелажника-стропальщика и значительной затратой времени при применении традиционных грузозахватных устройств, представляющих собой стропы для подвешивания грузов. В связи с этим более широко начали применяться манипуляторы с ручным управлением, которые обеспечивают более высокую производительность труда.
При погрузочно-разгрузочных работах, проводимых в портах, на железнодорожных станциях, при разгрузке автомобильного транспорта, когда осуществляется манипулирование крупнотоннажными грузами, традиционные средства автоматизации оказываются мало-эффективными. В настоящее время для осуществления полной автоматизации таких работ проводится как упорядочение и формализация самих грузов, так и создание новых технических средств их обслуживания.
Упорядочение грузов связано с их пакетированием, что само по себе позволяет в 2-3 раза сократить простои транспортных средств под грузовыми операциями, в 1,5-2 раза улучшить использование складских площадей и средств механизации грузопереработки, в 3-4 раза повысить производительность труда на грузовых операциях, в 1,5-2 раза снизить их трудоемкость и себестоимость. Наибольший эффект пакетных перевозок достигается тогда, когда пакет расформировывается или формируется в начале или конце технологического потока [49].
Пакетирование грузов осуществляется с помощью пакетоформирующих машин. Широкая номенклатура пакетируемых грузов и различных поддонов приводит к появлению такой же широкой гаммы этих машин. Следует также отметить, что сама техническая политика, принятая при создании пакетоформирующих машин, приводит к тому, что существующие конструкции требуют больших производственных площадей и эффективны только при достаточно высоком грузообороте. Схемы укладки грузов при пакетировании зависят от соотношения размеров их и поддонов. Как правило, укладка грузов осуществляется в перевязку, т. е. с разворотом последующего ряда относительно предыдущего на 90°. Согласно рекомендации ИСО приняты три типоразмера поддонов 800×1200; 1000×1200 и 800×1000 мм и предусмотрена возможность применения для международного обращения больших поддонов размерами 1200×1600 и 1200×1800 мм. Максимальная высота пакета, предназначенная для перевозки железнодорожным транспортом, соответствует при одноярусной системе 1900 мм, при двухъярусной - 1150-1350 и 850-1150 мм в зависимости от типа вагона.
В соответствии с этим максимальные объемы, которые должны обслуживаться промышленными роботами, предназначенными для формирования пакетов, лежат ориентировочно в пределах 1000×1500 мм в плане и высотой 1800 мм, а минимальные - 700×1000 мм в плане и высотой 1100 мм. Практически пакетирование всех видов грузов можно осуществить несколькими однотипными промышленными роботами, отличающимися размерами обслуживаемых ими объемов, т. е. рабочих зон, и грузоподъемностью. Наиболее эффективными средствами обслуживания контейнеров и терминалов являются краны с жестким подвесом груза, которые в сочетании с автономными грузозахватными устройствами, имеющими , ориентирующие степени подвижности и датчики контроля, и представляют собой робототехнические устройства, обеспечивающие практически полную автоматизацию при обслуживании транспортных средств.
Пакетирование грузов вызвало необходимость полного пересмотра принципов их комплектования и хранения, а создание специализированных механизмов, оснащенных сенсорными устройствами, дистанционным управлением и микропроцессорной техникой, позволило увеличить грузообороты и упростить поиск и учет поступающих на хранение грузов.
Успехи, достигнутые при создании робототехнических устройств, могут быть использованы и в перспективных разработках, например, при создании новых средств передачи грузов в море. Интерес к передаче грузов в море на ходу объясняется стремлением торгового флота увеличить объем перевозок полезных грузов за счет снижения запасов бункера, потребность в которых резко возрастает при дальних рейсах, например, связанных с ловом рыбы в открытых морях и океанах. В этих условиях возможности передачи грузов в море в значительной степени определяют экономическую эффективность промысла [14].
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'