Глава 8. Робототехнические системы в горнодобывающей промышленности
8.1. Общие положения
Рост добычи полезных ископаемых без увеличения числа работающих может быть достигнут за счет значительного повышения производительности труда, поэтому в настоящее время уделяется большое внимание вопросам механизации и автоматизации производства.
Горнодобывающие отрасли промышленности - наиболее тяжелые в отношении выполнения технологических процессов. Среда, в которой производятся эти работы, характеризуется следующими факторами: взрывоопасностью и загрязненностью атмосферы, высокими температурами и влажностью, шумом и вибрациями, высокими давлениями при кессонных работах, внезапными выбросами угля и газа и др. Их неблагоприятное воздействие усиливается с повышением темпов работ и переходом на более глубокие горизонты при подземных работах, особенно на угольных шахтах. Все это приводит к снижению производительности труда и увеличивает опасность для жизни человека.
Основным направлением для достижения безлюдной выемки полезных ископаемых является комплексная механизация и автоматизация производства. В этом направлении в последнее время проделана огромная работа. Созданы новые высокопроизводительные машины и средства их автоматизации. Некоторые процессы полностью механизированы и автоматизированы. Эксплуатация автоматизированного горного оборудования в различных бассейнах страны показала, что совершенствование средств управления позволяет в общем повысить технико-экономические показатели работы забойного оборудования. Однако во многих случаях ожидаемого эффекта по целому ряду причин получить не удалось. Это объясняется главным образом многофакторностью условий выполнения технологических процессов, сложным динамическим характером их протекания, стохастическим характером изменения среды, стесненностью пространства и непостоянством рабочего места. Все это создает значительные трудности для механизации и автоматизации традиционными способами. Особенно это проявляется при выемке маломощных пластов, необходимость в разработке которых с каждым годом возрастает.
Главной проблемой в настоящее время остается разработка способов и средств, повышающих эффективность ведения работ, что явится основой для решения генеральной социальной задачи - сокращения числа рабочих, а в дальнейшем - создания таких технологических процессов, которые исключали бы необходимость присутствия людей в забое.
Одним из возможных путей прогресса в области комплексной механизации и автоматизации является применение роботов и робототехнических систем и комплексов, выполняющих тяжелые операции в опасных условиях шахт и рудников.
В настоящее время уже решаются задачи создания высокоэффективных манипуляторов и промышленных роботов, в том числе с адаптивным управлением, построенным на основе микропроцессорной техники, с исполнительными органами, выполненными на малогабаритных гидропневмоэлектроприводах, с развитыми системами сенсорных устройств, для выполнения работ без постоянного присутствия человека в рабочих зонах, а также робототехнических очистных комплексов и агрегатов с универсальными управляющими и информационными устройствами и промышленными роботами.
В создании горной техники можно выделить две противоположные тенденции - универсализация и специализация оборудования. Положительными особенностями специализированного оборудования являются высокая производительность и простота устройства по сравнению с универсальными средствами механизации, пригодными для выполнения этой же операции.
Принципиальным недостатком специализированного оборудования является невозможность использования его для выполнения смежных операций. При цикличном проведении работ это означает, что, как правило, специальное оборудование имеет невысокий коэффициент машинного времени. При этом следует иметь в виду, что четкой границы между универсальным и специализированным оборудованием провести невозможно. Так, например, при создании универсального средства на его конструкцию накладывают ограничения вид технологического процесса, специфические условия подземного и открытого способов добычи, тип полезного ископаемого (уголь, руда, стройматериалы и др.). Для выполнения основных операций, очевидно, роботы должны быть специализированными, отражающими специфику данного технологического процесса, а для выполнения вспомогательных операций - более универсальными. Но в каждом конкретном случае должен проводиться анализ необходимого соотношения универсальности и специализации разрабатываемого робота.
В соответствии с основными технологическими процессами должны создаваться горные робототехнические комплексы: очистные, проходческие, горноспасательные, транспортные, информационные и др.
На основе анализа областей применения и операций, которые должны выполнять роботы, была проведена классификация подземных роботов [31] применительно к угольным шахтам (табл. 8.1).
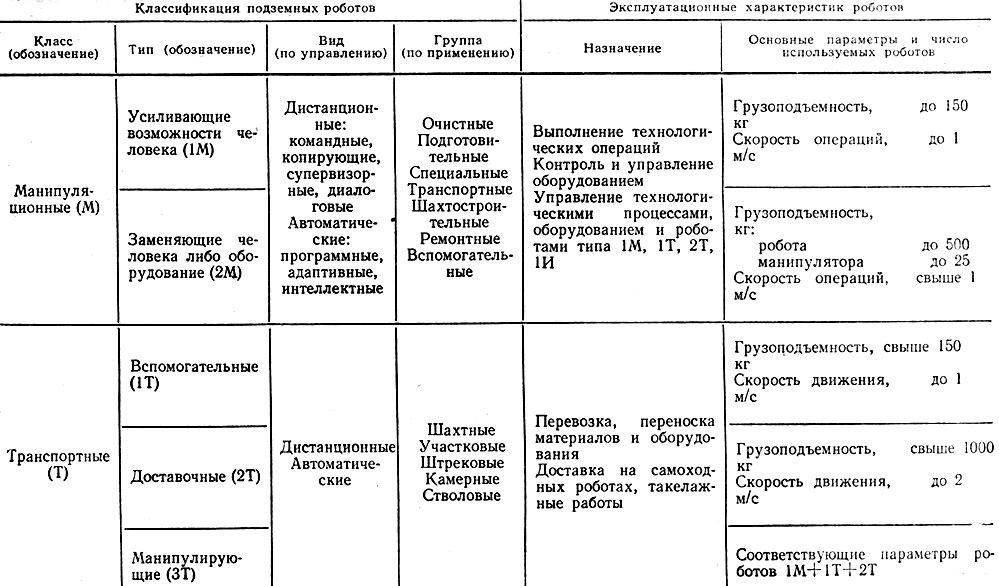
Таблица 8.1

Продолжение табл. 8.1
Для обеспечения безлюдной выемки угля, необходимо применение широкого класса роботов, различающихся как по функциональным возможностям и назначению, так и по применению. Что касается управления, то в зависимости от конкретных условий оно охватывает всю иерархию роботов от командных дистанционно управляемых до интеллектных автоматических. Сложность условий, в которых протекают горные технологические процессы, и неупорядоченность среды требуют создания адаптивных роботов, а в некоторых случаях, особенно для выполнения горноспасательных работ и функций обеспечения безопасных условий, необходимы интеллектные роботы. Вместе с тем, учитывая существующий уровень разработок по средствам очувствления, можно предположить, что такие горные роботы появятся только в будущем. Поэтому в настоящее время основное развитие при создании робототехнических систем для горнодобывающих отраслей промышленности должно получить дистанционное, преимущественно супервизорное управление, с использованием микропроцессорной техники и бортовых мини-ЭВМ. Но даже при этом телеуправляемые роботы должны обладать широкими адаптивными возможностями. С этой целью необходимо обеспечение их средствами очувствления.
|
ПОИСК:
|
При копировании материалов проекта обязательно ставить ссылку на страницу источник:
http://roboticslib.ru/ 'Робототехника'